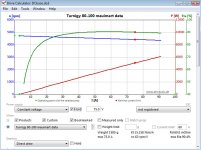
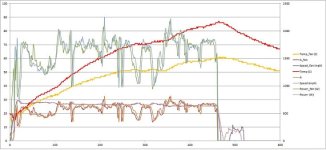
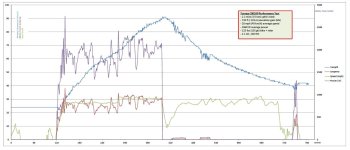
I'm currently running a rewound Turnigy 80100 and thought I would try to characterize some of its performance characteristics. This is obviously a popular motor for non-hub drive setups and as such it would be nice to know what some of its limitations are, and under what circumstances its efficiency is maximized. I recently installed a temp sensor (TMP36) between two teeth of the stator using JB-weld and today I finally finished writing the code for an arduino that will log data from the Cycle Analyst, read the temperature sensor data, append the temp data to the CA data stream, and log to an SD card. Attached is my first plot of test data for a short 2 mile hill climb (average 6% grade). As can be seen the motor heats up quite quickly with the 1860 watts average power over the 4:36 minute run. My overall goal of the project is to determine the levels of continuous power that can realistically be expected from this non-actively cooled setup. And once the limitations have been established I can start to test various cooling solutions in the hopes of getting the maximum performance out of this little power house of a motor.
I hope to add the following functionality to the data logging system:
- Ambient temperature sensor
- Motor rpm (although I can already do this using speed if I keep track of what gear I am in)
- Some sort of display (LCD or OLED) of motor temperature so I can keep an eye on things in real time
- Add GPS sensor (mostly for altitude data)
- Possibly measure and record phase amps
- Throttle position or maybe PWM duty cycle
Anyway, stay tuned for more data...
I hope to add the following functionality to the data logging system:
- Ambient temperature sensor
- Motor rpm (although I can already do this using speed if I keep track of what gear I am in)
- Some sort of display (LCD or OLED) of motor temperature so I can keep an eye on things in real time
- Add GPS sensor (mostly for altitude data)
- Possibly measure and record phase amps
- Throttle position or maybe PWM duty cycle
Anyway, stay tuned for more data...
") Any chance you are able to get the motor rpms up, you seem to be limited to 4900rpm atm and as far as i have read most people seem to indicate that the motor spins up to ~9000 before it starts having losses? That is alot of extra volts vrs current you could run into the motor, unless someone can extrapolate from the lower RPM to the higher one to get a complete picture
Any chance you are able to get the motor rpms up, you seem to be limited to 4900rpm atm and as far as i have read most people seem to indicate that the motor spins up to ~9000 before it starts having losses? That is alot of extra volts vrs current you could run into the motor, unless someone can extrapolate from the lower RPM to the higher one to get a complete picture