
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
#crossbreaks' midmotor CB120
- Thread starter crossbreak
- Start date
sn0wchyld
100 kW
looks really good mate... any indication at what point its likely to saturate? that Rph is incredibly low for that kV! The Motenergy im planning to use has a similar kv, but about 3x the rPh, so far more heat per unit torque. I'm guessing however that it wont saturate till ~2-3x the ph amps that this will. Still a great looking motor so far, particularly for that size/weight. Love your work.
Probably something for a later date, but any chance of a slightly larger one? I'd love to see a 150x100mm version, would still fit in my custom frame easily, but more power is never a bad thing heheh...
I'd love to see a 150x100mm version, would still fit in my custom frame easily, but more power is never a bad thing heheh...
Probably something for a later date, but any chance of a slightly larger one?
crossbreak
1 MW
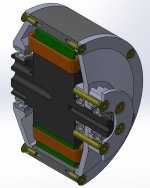
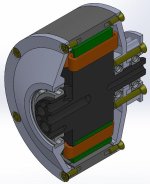
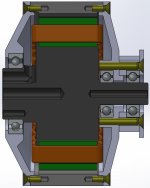
thx. air gap dia is 105mm now, with a 40mm stack. im fine with that for now.I am afraid it will actually saturate some where beyond 30 Nm, so 6 kW should be the max PowerOut for a reasonable speed with no (or only little) saturation, like 1500rpm or so. If you want more, you need to speed it up (and gear it down) and go for 100V+. Or maybe go for a bigger motor, that would be more reasonable from my point of view.
What i am interested in ATM is the cooling system and getting down hysteresis and eddy current drag figures. And weight, ATM it is at 3990g. I threw out the 6202 bearing on the pulley side and replaced it for two 6002's to distribute axle load, didnt make it more lightweight though. A 40T HTD-M5-15mm pulley on the drive side is what i aim for ATM, too keep it below 100mm total width. Otherwise, a 25T HTD-8M-20mm would be an option, with 105mm total width.
What i am interested in ATM is the cooling system and getting down hysteresis and eddy current drag figures. And weight, ATM it is at 3990g. I threw out the 6202 bearing on the pulley side and replaced it for two 6002's to distribute axle load, didnt make it more lightweight though. A 40T HTD-M5-15mm pulley on the drive side is what i aim for ATM, too keep it below 100mm total width. Otherwise, a 25T HTD-8M-20mm would be an option, with 105mm total width.
John in CR
100 TW
crossbreak said:This motor is basically small version of the JohnInCR Midmonster with optimized packaging
Too bad you didn't go full size, though even a minimized width full size MiniMonster (150mmx50mm stator) would be awesome at a kv of 30-40rpm/v . 120's simply aren't enough motor for me or my customers without going to 2 stage reductions, otherwise I'd buy some.
Great job on the overall design...exceeded your target peak ETA with the prototype. Since I realize a few kg makes no difference and I spend a lot of time off the throttle at high rpm, I'd push for a lower slot and pole count despite the heavier back iron requirement, in order to get the core loss numbers down. Also a slot count divisible by 6, so it can be a 6 phase too. That's for your next stage...a bigger motor.
Did I miss the cooling drawings, or did you not post them yet?
John in CR said:Since I realize a few kg makes no difference and I spend a lot of time off the throttle at high rpm, I'd push for a lower slot and pole count despite the heavier back iron requirement, in order to get the core loss numbers down.
from my experience:
heavy frame + heavy rider, together with lightweight motor = optimal (smooth ride, not much wobbling at uneven road)
light frame + light rider, together with heavy motor = worst (bike wobbling alot at uneven road)
so it depends always on the ratio sprung to unsprung weight
For Hub drive i would push for high pole count design tegether with thin lams. Aside from the less heavy back iron, also the stator will be far lighter.
More pole pairs also means improved torque and easier to drive for the controllers.
In my opinion, the design of BionX D-series is optimal for Hub drive, and Joby has the most improved design for high RPM.
The only thing that speaks against high pole count is the price.
CB's motor is a very good balance between all. The numbers are awesome.
John in CR
100 TW
madin88 said:More pole pairs also means improved torque and easier to drive for the controllers.
This simply isn't true. The Chinese went to high slot and pole counts because the small resulting teeth require little back iron. Torque per amp is based on Kv...period. Regarding controllers, the same Kv in a high slot and pole count motor is actually harder to drive. That's because with the lower slot/pole count you pick up more inductance...ie 4 turns on half as many larger coils has greater inductance than 2 turns on double the coils due to mutual inductance between each turn having greater effect than adding those turns via more coils. The high slot/pole count hubbies were adopted because they're the cheapest to make.
Regarding the weight thing, while I can appreciate ultra-light pedal bikes with electric assist being a close cousin, Crossbreak's mid-drive motor is way beyond that league. It's not a hubbie, so the unsprung weight stuff (which I fully understand) doesn't come into play. Small dimensions do, as space is our most valuable commodity on an ebike. A few kg though makes no difference in the real world though, because that's like saying someone who weighs a few kg more can't enjoy virtually identical performance. The added weight of a bigger motor comes with huge tangible benefits.
We all were hoping the Revolt160 might fill the gap in what's available, but I understand Crossbreak wanting to start smaller with a closer to ideal 120. I just hope he enjoys enough success to create a bigger motor and make it available at mass production prices....Say 6-9kg with high efficiency and a Kv in the 30-40rpm/volt range. Whether it's full blown motorcycles for kids or extreme performance lightweight fun bikes for adults, or even very light highway speed capable electric transportation, such a motor has useful applications.
sn0wchyld
100 kW
+1John in CR said:madin88 said:More pole pairs also means improved torque and easier to drive for the controllers.
This simply isn't true. The Chinese went to high slot and pole counts because the small resulting teeth require little back iron. Torque per amp is based on Kv...period. Regarding controllers, the same Kv in a high slot and pole count motor is actually harder to drive. That's because with the lower slot/pole count you pick up more inductance...ie 4 turns on half as many larger coils has greater inductance than 2 turns on double the coils due to mutual inductance between each turn having greater effect than adding those turns via more coils. The high slot/pole count hubbies were adopted because they're the cheapest to make.
Regarding the weight thing, while I can appreciate ultra-light pedal bikes with electric assist being a close cousin, Crossbreak's mid-drive motor is way beyond that league. It's not a hubbie, so the unsprung weight stuff (which I fully understand) doesn't come into play. Small dimensions do, as space is our most valuable commodity on an ebike. A few kg though makes no difference in the real world though, because that's like saying someone who weighs a few kg more can't enjoy virtually identical performance. The added weight of a bigger motor comes with huge tangible benefits.
We all were hoping the Revolt160 might fill the gap in what's available, but I understand Crossbreak wanting to start smaller with a closer to ideal 120. I just hope he enjoys enough success to create a bigger motor and make it available at mass production prices....Say 6-9kg with high efficiency and a Kv in the 30-40rpm/volt range. Whether it's full blown motorcycles for kids or extreme performance lightweight fun bikes for adults, or even very light highway speed capable electric transportation, such a motor has useful applications.
macribs
10 MW
- Joined
- Jul 22, 2014
- Messages
- 3,702
1+ John in CR
The 6-7kw CB120, as you said john CB120 is a very good starting point. I do hope we will see a future version on steroids, something crazy like 15-20 kw. As long as it could run single reduction without jackshaft the motor will be able to sit low and centered in the frame, all motor weight will be sprung mass. And centralized too which will help with handling, performance and the overall flickability in tight corners and narrow sections.
Look at them 4 stroke 450's, they are more heavy then say a 2 stroke 125cc, yet they are just as easy if not more (4 stroke low torque) to ride trial style enduro on insane climbs in rocky terrain then the lighter 125cc. Decent riders climbs inclines so steep & so rough most people wouldn't even walk up.
The 6-7kw CB120, as you said john CB120 is a very good starting point. I do hope we will see a future version on steroids, something crazy like 15-20 kw. As long as it could run single reduction without jackshaft the motor will be able to sit low and centered in the frame, all motor weight will be sprung mass. And centralized too which will help with handling, performance and the overall flickability in tight corners and narrow sections.
Look at them 4 stroke 450's, they are more heavy then say a 2 stroke 125cc, yet they are just as easy if not more (4 stroke low torque) to ride trial style enduro on insane climbs in rocky terrain then the lighter 125cc. Decent riders climbs inclines so steep & so rough most people wouldn't even walk up.
crossbreak
1 MW
John in CR said:Great job on the overall design...exceeded your target peak ETA with the prototype. Since I realize a few kg makes no difference and I spend a lot of time off the throttle at high rpm, I'd push for a lower slot and pole count despite the heavier back iron requirement, in order to get the core loss numbers down. Also a slot count divisible by 6, so it can be a 6 phase too. That's for your next stage...a bigger motor.
Did I miss the cooling drawings, or did you not post them yet?
The two cooling systems (Air/Statorade with radial fan) and water cooling are still in design. As they shall work together, I and my team are trying to make a coherent overall concept and put it into a package with smallest possible footprint. Sorry but i dont want to post pics of half-baked cooling systems. I focus on the drive system ATM, while my college is working on the cooling concept.
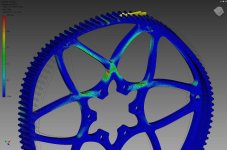
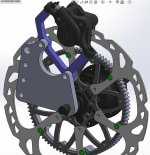
Here is a pic of the rear wheel HTD belt drive sprocket under load. The sprocket carries a 203mm shimano disc brake rotor, too. Still a bit half baked i must admit, but i hope you get the idea
Attachments
crossbreak
1 MW
the belt-sprocket/disc rotor spider shall fit normal 135mm wide rear wheel hubs with 6-hole disc brake rotor interface. anyway it is thicker than a normal disc rotor (5mm instead of 2mm). three washers (1.5mm thick) must be added to the axle to even this out. 135mm wide frames must be stretched to 141mm, this is not a problem for most aluminum frames.
I dont like stretching frames though. I can offer a complete rear wheel with custom shimano FH-M525 hub and custom solid chrome-steel screw axle. The hub has a shortened disc rotor interface that fits 135mm frames without any stretching. The wheel comes with a Mavic EX729 rim, 13g reinforced DT-Swiss spokes and a 2.25-22" IRC moped tire provided by Heidenau. The tire is quite good for combined on-road/off-road driving and i did not yet find any MTB frame that is too narrow to fit this tire. Tire dimensions are equal to a 2.5-26" MTB tire, it has more rubber and lasts ebike (ab-) use much longer than a MTB tire does
I dont like stretching frames though. I can offer a complete rear wheel with custom shimano FH-M525 hub and custom solid chrome-steel screw axle. The hub has a shortened disc rotor interface that fits 135mm frames without any stretching. The wheel comes with a Mavic EX729 rim, 13g reinforced DT-Swiss spokes and a 2.25-22" IRC moped tire provided by Heidenau. The tire is quite good for combined on-road/off-road driving and i did not yet find any MTB frame that is too narrow to fit this tire. Tire dimensions are equal to a 2.5-26" MTB tire, it has more rubber and lasts ebike (ab-) use much longer than a MTB tire does
macribs
10 MW
- Joined
- Jul 22, 2014
- Messages
- 3,702
CB you have put a lot of thought and effort into this, even going deep into cooling. Kudos for sticking to your guns and follow thru.
I am even more excited about his now that I realized what cooling you got brewing. August targeted as release, thats for cooling option too?
I am even more excited about his now that I realized what cooling you got brewing. August targeted as release, thats for cooling option too?
crossbreak
1 MW
yes. Release date is August 2017. You can buy a bare motor or the kit. It will include:
- CB120 Motor incl. KTY83 temperature probe (10k thermistor for CA-V3 is optional), HTD belt pulley, air/Statorade cooling system, incl. airduct and rockfall/dirt motor protector
- BB-Mount Kit (68mm..73mm only) incl. Truvativ ® ISIS GigaPipe Bottom Bracket, cranks, chainring spider
- Kelly KLS7218S Controller, 90V abs max and 200A max phase current, factory tuned
- junction box incl. all necessary connectors, CycleAnalyst V3-DP ready, with some extra space for optional 12V converter and some space for excess cable length, mount kit
- HTD belt pulley for the rear wheel, 203mm shimano disc brake rotor, spider and bolts, pre-assembeled
- Gates PowerGrip GT3 ® HTD-belt
- waterproof thumb throttle, hall-type, 1...4V output
- second thumb throttle for variable regen brake control
Optional Products:
- Watercooling Kit, incl. radiator, fan(s), pump, water vessel, tubing and combined fan/pump controller, mount kit
- CycleAnalyst V3-DP
- PAS, only with the CycleAnalyst V3
- mount kit for CycleAnalyst V3-DP, 1-1/8" or 1.5" forks
- 12V converter, 5A max, 90V abs max input voltage
- Highsider ® Satellite 55mm mini low beam headlight, E4 approved, only 8W power consumption at >1000 lm, extra flat light profile for best vision
- Highsider ® Satellite 55mm mini high beam headlight, E4 approved, only 12W power consumption at >1500 lm
- Combined high and low beam mount kit for 1-1/8" or 1.5" forks
- 42t single chainring, 7...10 speed compatible
- key ignition switch with optional handlebar lock, mount kit for 1-1/8" or 1.5" forks
optinal wheel products:
- custom Shimano ® FH-525 rear hub with custom chromoly solid axle
- pre-assembled wheel, shimano rear hub laced into a Mavic ® EX729 rim with 13g DT-Swiss spokes
- Schwalbe ® rim tape
- Continental ® 2.5-26" tube, standard Schrader valve
- Heidenau ® IRC moped tire 2.25-22" (same dimensions as a 2.5-26" MTB tire)
- pre-assembled Front wheel kit, compatible with 15mm and 20mm through axles, disc brake compatible. rim and tire are the same as for the rear wheel
Optional products that are NOT available in August, release date is to be announced
- battery, 13s14p, 48V, 2000 Wh nominal, 140A max discharge current, max 40 A charge current (100A pulse current is OK for max. 10 seconds). Li-Ion battery, incl. BMS and aluminum case, preassembled, frame mount kit
- reinforced Eltek ® Flatpack-S charger, 1800 W, 85 - 300 VAC / 85 - 250 VDC, for 13s Li-Ion batteries with BMS
- Tektro ® Dorado rear Brake kit with variable Regen sensor, hall type 1...4V, E4 and DOT approved
- Tektro ® Dorado front Brake kit with motor-cut off contact, E4 and DOT approved
- LED Indicator kit incl. mount kit and flash controller, 12V, only 3W max consumption, E4 and DOT approved
- combined LED brake light/ LED rear light, incl. mount kit, 12 V only 3W max consumption, E4 and DOT approved
- Mirror Kit for 25.4mm or 31.8mm handlbars, E4 and DOT approved
-mudhugger ® mudguards, fits every MTB frame&fork, mount kit
- rockfall protector for the headlights (not E4/DOT approved!)
- tubeless kit for the wheels/ tubeless, pre-assembled wheels
- SRAM pedal drive kit incl. left hand grip shifter, cables, derailleur and 8-speed cassette (11t...32t)
A seperate for sale thread will be started as soon as the products are available for pre-order. Please keep this thread clean of any discussion concerning ordering those products. Thanks")
- CB120 Motor incl. KTY83 temperature probe (10k thermistor for CA-V3 is optional), HTD belt pulley, air/Statorade cooling system, incl. airduct and rockfall/dirt motor protector
- BB-Mount Kit (68mm..73mm only) incl. Truvativ ® ISIS GigaPipe Bottom Bracket, cranks, chainring spider
- Kelly KLS7218S Controller, 90V abs max and 200A max phase current, factory tuned
- junction box incl. all necessary connectors, CycleAnalyst V3-DP ready, with some extra space for optional 12V converter and some space for excess cable length, mount kit
- HTD belt pulley for the rear wheel, 203mm shimano disc brake rotor, spider and bolts, pre-assembeled
- Gates PowerGrip GT3 ® HTD-belt
- waterproof thumb throttle, hall-type, 1...4V output
- second thumb throttle for variable regen brake control
Optional Products:
- Watercooling Kit, incl. radiator, fan(s), pump, water vessel, tubing and combined fan/pump controller, mount kit
- CycleAnalyst V3-DP
- PAS, only with the CycleAnalyst V3
- mount kit for CycleAnalyst V3-DP, 1-1/8" or 1.5" forks
- 12V converter, 5A max, 90V abs max input voltage
- Highsider ® Satellite 55mm mini low beam headlight, E4 approved, only 8W power consumption at >1000 lm, extra flat light profile for best vision
- Highsider ® Satellite 55mm mini high beam headlight, E4 approved, only 12W power consumption at >1500 lm
- Combined high and low beam mount kit for 1-1/8" or 1.5" forks
- 42t single chainring, 7...10 speed compatible
- key ignition switch with optional handlebar lock, mount kit for 1-1/8" or 1.5" forks
optinal wheel products:
- custom Shimano ® FH-525 rear hub with custom chromoly solid axle
- pre-assembled wheel, shimano rear hub laced into a Mavic ® EX729 rim with 13g DT-Swiss spokes
- Schwalbe ® rim tape
- Continental ® 2.5-26" tube, standard Schrader valve
- Heidenau ® IRC moped tire 2.25-22" (same dimensions as a 2.5-26" MTB tire)
- pre-assembled Front wheel kit, compatible with 15mm and 20mm through axles, disc brake compatible. rim and tire are the same as for the rear wheel
Optional products that are NOT available in August, release date is to be announced
- battery, 13s14p, 48V, 2000 Wh nominal, 140A max discharge current, max 40 A charge current (100A pulse current is OK for max. 10 seconds). Li-Ion battery, incl. BMS and aluminum case, preassembled, frame mount kit
- reinforced Eltek ® Flatpack-S charger, 1800 W, 85 - 300 VAC / 85 - 250 VDC, for 13s Li-Ion batteries with BMS
- Tektro ® Dorado rear Brake kit with variable Regen sensor, hall type 1...4V, E4 and DOT approved
- Tektro ® Dorado front Brake kit with motor-cut off contact, E4 and DOT approved
- LED Indicator kit incl. mount kit and flash controller, 12V, only 3W max consumption, E4 and DOT approved
- combined LED brake light/ LED rear light, incl. mount kit, 12 V only 3W max consumption, E4 and DOT approved
- Mirror Kit for 25.4mm or 31.8mm handlbars, E4 and DOT approved
-mudhugger ® mudguards, fits every MTB frame&fork, mount kit
- rockfall protector for the headlights (not E4/DOT approved!)
- tubeless kit for the wheels/ tubeless, pre-assembled wheels
- SRAM pedal drive kit incl. left hand grip shifter, cables, derailleur and 8-speed cassette (11t...32t)
A seperate for sale thread will be started as soon as the products are available for pre-order. Please keep this thread clean of any discussion concerning ordering those products. Thanks
crossbreak said:I dont like stretching frames though. I can offer a complete rear wheel with custom shimano FH-M525 hub and custom solid chrome-steel screw axle. The hub has a shortened disc rotor interface that fits 135mm frames without any stretching. The wheel comes with a Mavic EX729 rim, 13g reinforced DT-Swiss spokes and a 2.25-22" IRC moped tire provided by Heidenau. The tire is quite good for combined on-road/off-road driving and i did not yet find any MTB frame that is too narrow to fit this tire. Tire dimensions are equal to a 2.5-26" MTB tire, it has more rubber and lasts ebike (ab-) use much longer than a MTB tire does
Well developed!
I really like the silent belt drive with the possibility of regenerative braking (like on the Zero Motorcycles).
John in CR said:This simply isn't true.madin88 said:More pole pairs also means improved torque and easier to drive for the controllers.
John in CR said:The high slot/pole count hubbies were adopted because they're the cheapest to make.
If you find that high pole count motors are the cheapest to make, and that there is no improved torque density when comparing low vs high pole designs, than you're either ignorant or you don't know much about that matter.
When i was at eurobike exhibition, i have spoked with bionx about theire motor develpment (there was a cut open D-series hub), and in sum they told:
for making a lightweight DD hub motor with good efficiency and torque density, it requires a high pole count design with large air gap diameter and very thin lams.
thats NOT CHEAP, so no company does it like this.
Would you not agree that it is more like this in actual fact?
Also Joby produces theire motors exactly the opposite as you presist in saying to be the optimal Hub motor design.
The reason why Joby went with such design was the requirement of lowest possible weight for airplane usage, and in view of hub driven bikes i would say that unsprung mass is not less than equatable to the weight savings on an airplane
John in CR
100 TW
Sorry CB, this will be my last post that muddies up your thread. I'll stick to your motor as designed from now on. BTW, you've mentioned ferrofluid as a cooling option, but has it proven effective and durable at the higher rpm operation of a mid-drive? BTW2, great work toward a turnkey solution, and I especially like the hub/pulley/brake combo and whole wheel solutions coming soon. Taking care of those headaches, while at the same time reducing unsprung weight and saving space deserves a big pat on the back.
Madin88,
Every time you choose to take a stand in contradiction to posts I use my valuable time to make, you are wrong. I don't care if you're just the argumentative type and twist conditions and assumptions to support incorrect statements, but I refuse to participate beyond this post. You seem intelligent enough and interested enough to learn, but quoting a sales pitch and talking about low power hubmotors in a non-hubbie thread brings that into question. I suggest gaining a true understanding of:
1. The relationship between any motor's voltage constant and torque constant, Kv & Kt (ie Kt in Nm/amp= 9.549/Kv in rpm/volt), and
2. The 2 sources of heat in our motors (copper losses that go up by the square of current and iron losses that increase with rpm whether or not the motor is powered), along with the key measurements that give us heat info (Rm- phase to phase resistance, and no-load current at multiple rpm.)
Madin88,
Every time you choose to take a stand in contradiction to posts I use my valuable time to make, you are wrong. I don't care if you're just the argumentative type and twist conditions and assumptions to support incorrect statements, but I refuse to participate beyond this post. You seem intelligent enough and interested enough to learn, but quoting a sales pitch and talking about low power hubmotors in a non-hubbie thread brings that into question. I suggest gaining a true understanding of:
1. The relationship between any motor's voltage constant and torque constant, Kv & Kt (ie Kt in Nm/amp= 9.549/Kv in rpm/volt), and
2. The 2 sources of heat in our motors (copper losses that go up by the square of current and iron losses that increase with rpm whether or not the motor is powered), along with the key measurements that give us heat info (Rm- phase to phase resistance, and no-load current at multiple rpm.)
John in CR said:Madin88,
Every time you choose to take a stand in contradiction to posts I use my valuable time to make, you are wrong. I don't care if you're just the argumentative type and twist conditions and assumptions to support incorrect statements, but I refuse to participate beyond this post. You seem intelligent enough and interested enough to learn, but quoting a sales pitch and talking about low power hubmotors in a non-hubbie thread brings that into question. I suggest gaining a true understanding of:
Arguments like "This simple is not true" or "you are wrong" aro no good base for any forum.
crossbreak went for a higher pole design as Revolt (more than TWICE!), and the numbers from his motor are MUCH better - especially the losses per given torque got down alot.
If a motor is built like shit, it will perform as shit - no matter if high or low pole design.
Fact is that if you focus on weight, you need a high pole design togehter with expensive silicon steel lams to keep iron losses low.
I am aware that this thread is about middrive, and from my side the discussion was more about that argument from you John that you would push for a lower slot and pole count desing for cb's "next step", which i would not agree with because the torque density will suffer. I would keep the actual design and using thinner lams.
The thing with the DD hubies i brought up because motors like the D-series are a good demenstration of what's possible regarding torque per weight when using high end materials and good engineering.
even if those are "lower power models", we, or better say the big manufacturers can learn something there
Rube
100 W
Hi CB, great to see your progress is coming to fruition. I'm in your target market and IMO your design goal fills a void (actually several based on the amount of integration) that has had me searching for a while.
John thanks for your contribution, as novice the time you take to post is really valuable for me.
Maddin, your passion is great, you views differ from a few members in this thread. Starting a thread to debate your ideas is a better option that getting this one off topic.
John thanks for your contribution, as novice the time you take to post is really valuable for me.
Maddin, your passion is great, you views differ from a few members in this thread. Starting a thread to debate your ideas is a better option that getting this one off topic.
crossbreak
1 MW
+1, those 5kg+ hubbies are 250W rated. different league. Squaring the circle is a difficult task. Just one reason why i like the idea of taking away motor mass from the wheel entirely. Total mass doesnt matter so much then and reduction ratio doesnt have to be so great as a result (like 2.67 to one is sufficient here). Just a more simple engineering approach. High pole counts can reduce magnetic resistance of a motor for a given package, this has limits though. One reason is that end turns become flatter. Sure those DD-Hub guys tell you they are the greatest with their uber high pole counts and expensive foil like lamination stacks. One reason for the 27n 30p combination is the very low cogging torque and that i could use a proven pattern. I would have wanted some less poles, but there was no qood combination below that... 18n-16p simply has more cogging and end turns that limit stack size more within this given package: It shall fit between the cranks in the end.John in CR said:Madin88 [...] You seem intelligent enough and interested enough to learn, but quoting a sales pitch and talking about low power hubmotors in a non-hubbie thread brings that into question
Yes, eddy currents are a big problem of the CB120 motor. I will reduce them ASAP and as good as possible within the budget - thus we cannot go thinner then .3mm , the prototype has .5mm ATM as it is only a proof of concept if we manage 90%+ (the goal we set our selves) and we did. I want this motor/kit to be priced reasonably, a different league compared to Bionix, too. Anyway, thanks for your input Maddin, these arguments you mentioned where exactly those that we had in mind when choosing pole/slot count. I think we are not so far apart here. You can further discuss that topic in the Motor comparison thread https://endless-sphere.com/forums/viewtopic.php?f=30&t=65757#p989037
Hope i can post some pics of the air cooling system tonight.
@John: Drag figures we aim for the Statorade were extrapolated from the results Justin got during his tests. 3ml should be ok for this motor with relatively little drag and good cooling effect. This motor has a quite thin air gap (around 400µm) to get down magnetpath-resistance and raise Km² within manageable tolerances. So little amounts of ferrofluid should sufficient. Tests will follow in a few weeks when the Statorade arrives.
John in CR
100 TW
Cogging torque, got it. It's something I never give a second's thought to, since I haven't pedaled through HubMonster's resistance to turn, however, both HubMonster and MidMonster coast tremendously further than other hubbies I've used, so maybe there's magic in 20 magnets 24 slots in terms of cogging torque.
To me your steel quality is suspect, since your no load current exceeds all 3 models of my high efficiency hubbies, all of which have .3 lams and wider stacks and magnets.
To me your steel quality is suspect, since your no load current exceeds all 3 models of my high efficiency hubbies, all of which have .3 lams and wider stacks and magnets.
low cogging torque is desired for regenerative braking - otherwise it makes a freewheel necessary and you can forget it entirely...
good job CB
320W no-load at 2270RPM i think are not bad for such kind of motor with 0,5mm lams.
I wonder whats the price difference for sizes between 0,2 to 0,5mm? For RC motors 0,2mm is quite common and the new MAC's have 0,27mm sheets.
good job CB
320W no-load at 2270RPM i think are not bad for such kind of motor with 0,5mm lams.
I wonder whats the price difference for sizes between 0,2 to 0,5mm? For RC motors 0,2mm is quite common and the new MAC's have 0,27mm sheets.
crossbreak
1 MW
as said, i try to get those sheets as thin as possible. the first measurement was off. at 1200 rpm it is more like 90W, i guess my laser rpm tool did not work right when i took the first measurement. I rechecked with a multimeter...some kind of aliasing effect got in the middle. But i could repeatably measure that 320W no load at 2270rpm
Anyway, this eddycurrent drag is awefully high, i have to get it down. I am working on that.
Yes there is a lot of magic in 24n 20p, but the the guy i order those sheets from has no 24n die-cutter pattern with teeth that where deep enough. I may change this as soon as I have the money to improve this motor further.
Anyway, this eddycurrent drag is awefully high, i have to get it down. I am working on that.
Yes there is a lot of magic in 24n 20p, but the the guy i order those sheets from has no 24n die-cutter pattern with teeth that where deep enough. I may change this as soon as I have the money to improve this motor further.
FelixSphere
100 mW
- Joined
- Apr 18, 2014
- Messages
- 35
Maybe not directly related to the motor....but has anyone dxf's for the gates carbon drive belts ? The belts itself are pretty cheap, but the prices for the gearwheels are heavy stuff. Just because I saw the drawing above... Thanks
Thankscrossbreak
1 MW
Look here https://endless-sphere.com/forums/viewtopic.php?f=28&t=26122&start=165
crossbreak
1 MW
izeman
1 GW
klassische doppelpassungmadin88 said:i believe here should be a gap: