
Bob Builder
10 µW
I'm running into problems while trying to build a small tug prototype. Hopefully someone can help me out.
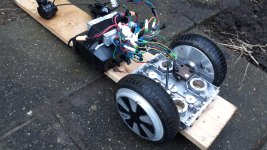
My current main problem is the motor controller reverse. I figured to start as simple as possibile so I got 2 hoverboard motors, 2 kunray s6-25 motor controllers, 2 thumb controllers and 2 standard hoverboard batteries. I thought of just fixing the 2 thumb controllers side by side and coupling them physically.
Problem is, the motors spin opposite so the contraption just spins around. The controllers do have a reverse function when connecting 2 wires together. The problem is that the speed in reverse is significantly slower... Do I need other motor controllers or is there a simple trick? These were very cheap.
The goal is something compact that can pull up to 300 kg / 700 lb. Speed ideally walking speed. It can be slower while pulling up a slope etc. It'll be a 'co bot' in the sense that I will also pull it. So the tug doesn't need to do all the work. I will attach a stick and a handle to it so I can pull it.
Ergonomics are very important. That's why it has to be small. Ideally it can also spin freely so I can pull it while there is no load to pull by walking fast.
My question about this is, I'm guessing this generates electricity, is this a problem? Will this go back to the battery?
I'm also in doubt about the hoverboard batteries and the controller and the requirements. If each motor gets it's own controller and battery, will the battery be fine with this controller? As I understand it draws 17 amps at max from the battery. Or am I at risk of setting the batteries on fire?
BTW I'm probably not yet on the right path here. Ideally it would be geared and lightweight in the future.
My current main problem is the motor controller reverse. I figured to start as simple as possibile so I got 2 hoverboard motors, 2 kunray s6-25 motor controllers, 2 thumb controllers and 2 standard hoverboard batteries. I thought of just fixing the 2 thumb controllers side by side and coupling them physically.
Problem is, the motors spin opposite so the contraption just spins around. The controllers do have a reverse function when connecting 2 wires together. The problem is that the speed in reverse is significantly slower... Do I need other motor controllers or is there a simple trick? These were very cheap.
The goal is something compact that can pull up to 300 kg / 700 lb. Speed ideally walking speed. It can be slower while pulling up a slope etc. It'll be a 'co bot' in the sense that I will also pull it. So the tug doesn't need to do all the work. I will attach a stick and a handle to it so I can pull it.
Ergonomics are very important. That's why it has to be small. Ideally it can also spin freely so I can pull it while there is no load to pull by walking fast.
My question about this is, I'm guessing this generates electricity, is this a problem? Will this go back to the battery?
I'm also in doubt about the hoverboard batteries and the controller and the requirements. If each motor gets it's own controller and battery, will the battery be fine with this controller? As I understand it draws 17 amps at max from the battery. Or am I at risk of setting the batteries on fire?
BTW I'm probably not yet on the right path here. Ideally it would be geared and lightweight in the future.
Attachments


Last edited:

")



