udaykishanr
100 µW
- Joined
- Jun 16, 2017
- Messages
- 7
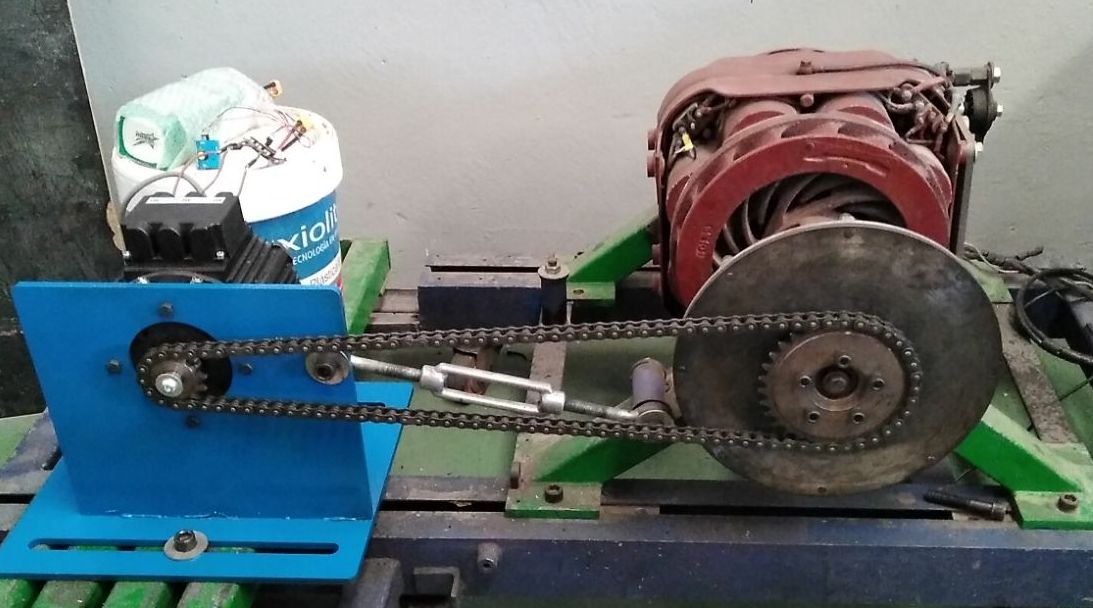
e-vektor said:Actually I work for a company writting software for dynamometers. This research is partial hobby (for the e-ATV), and partial for investigation about the needs of dynamometers when used with electric motors. Torque and Power are the basic variables you get in a dynamometer, even for an inertial dyno (with the suitable amount of mass). For this project I used SP5 DAQ (braked) that also controls an eddy current brake and acquires load cell (torque). This allows me to sweep tests but also stationary tests (rpm constan)
The purpose of a standard dynamometer is normally measuring HP and TQ, but with electric motors I think the next interesting variable is efficiency. For that purpose in some tests I acquired battery voltage and current (Curtis+Motor is considered a black box) and then with the battery power (V*I) and mechanical power (KW) it is easy to calculate efficiency.
This induction motor had a peak of about 86%, but I didn't finish the software for creating a whole map, so I cannot be sure if there is another peak somewhere- Anyway 86% is good for me. And also, keep in mind that when driving the motor to max torque it can decrease up to 65% or so.
And regarding the question about torque, normally with electric motors there is a direct relationship between current and torque. But with induction motors it also changes with slip (difference between mech speed and electric speed), so you will need some dyno if you want to have the resulting torque.
And regarding the graphs, I still have doubts about what is the true nominal speed. According to my calculations it should be around 2000 rpm as stated in the previous post. Indeed as you can see how torque decreases from this point, since the inverter has no more available voltage to follow the increasing speed, then current starts to decrease. But somehow the inverter is able to still increase the power up to 3200 rpm (other motors have flat power at this point), and then it quicly falls in THIS test, but when performing a slow sweep from 3200 to 3700, I can see that the inverter little by little is able to increase AGAIN the torque, and provides a no so deep fall
Another interesting fact: I think the actual TQ graph from 0 to 2000 rpm should be almost flat, but the inverter needs more time to adjust its PIDs, it does not behave in the same way during an acceleration transient
How much Amps can your inverter handle?
e-vector,
Thanks for that elaborated explanation.
Well, the Inverter which I made handles upto 300A (I am using a 24V Battery), however I can increase its current capacity handling by changing the MOSFETs that are in the inverter.
Till now, I thought 300A will be good enough to run the motor for my application (for the nature of the load I am using).
I am using V/f control method to vary the speed of the motor. I have the freedom of varying frequency with the set up I have.
I am trying to run the motor at different frequency values, with the motor loaded with a blower fan.
At 200Hz, Stator speed is 3000RPM and Rotor speed is 2700RPM (measured), which amounts to a slip of 0.1.
If I increase the frequency further the rotor falls out of synchronism since the battery voltage is only 24V and V/f ratio is not maintained further.
The problem with me is... like I said in the previous post, I cannot able to track the torque and speed characteristics continuously.
I have "Fluke 433 Three-phase Power Quality Analyzer", but I think this wont give torque value. It displays Power output in KW and from that I can calculate torque by using one of the formula.
The stuff which you spoke in the post regarding dynamo meters is new to me. I need to get familiarize with using dynamo meters.
Since now you know what I am looking for, can you recommend a basic (easy to use) dynamo meter which outputs the continuous torque speed values when the motor is loaded externally? I am testing the motor by loading it with a blower fan (2nd order).
Thanks a lot
Uday
") I'm having trouble finding anything simple that is rated for anywhere near that power level. To get a current rating near the 550A, I have to go to something like a full hybrid car (Chevy Volt, etc.) inverter.
I'm having trouble finding anything simple that is rated for anywhere near that power level. To get a current rating near the 550A, I have to go to something like a full hybrid car (Chevy Volt, etc.) inverter.