
Hey guys, So I am working on getting a wireless nunchuck working with an arduino nano for my eboard setup. I am using AustinDavid's wiiceiver code and modifying it so I can also include a voltage indicator.
Here is a diagram of my wiring:
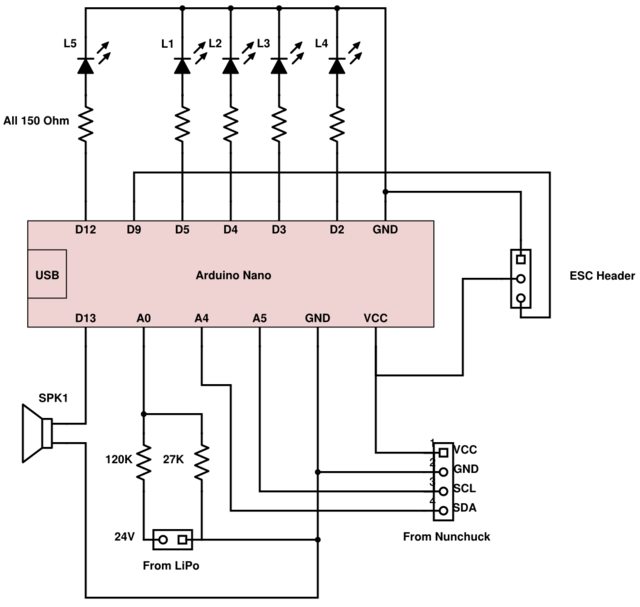
Using a voltage divider circuit I am measuring my voltage from my 6s lipo and converting it to a 0-5v range. Then I am using some code to display this via 5 LED lights.
the modified code is here:
It's not very pretty but it works... or so I thought. Running the board upside down it seems to work (I noticed that sometimes when at full power the voltage will drop and an led would go out)
However, when I ride it, it will be fine up until I reach full speed, when the board will cut out and not respond to anything for a few seconds before kicking back in. This happens regularly, and I also notice that as I increase speed the led's will go out one by one. That seems like a massive voltage drop.
Just wondering if I could get some help on this, maybe some of my code is bad and interfering?
Cheers!!!
Here is a diagram of my wiring:
Using a voltage divider circuit I am measuring my voltage from my 6s lipo and converting it to a 0-5v range. Then I am using some code to display this via 5 LED lights.
the modified code is here:
Code:
/*
* (CC BY-NC-SA 4.0)
* http://creativecommons.org/licenses/by-nc-sa/4.0/
*
* WARNING WARNING WARNING: attaching motors to a skateboard is
* a terribly dangerous thing to do. This software is totally
* for amusement and/or educational purposes. Don't obtain or
* make a wiiceiver (see below for instructions and parts),
* don't attach it to a skateboard, and CERTAINLY don't use it
* to zip around with just a tiny, ergonomic nunchuck instead
* of a bulky R/C controller.
*
* This software is made freely available. If you wish to
* sell it, don't. If you wish to modify it, DO! (and please
* let me know). Much of the code is derived from others out
* there, I've made attributuions where appropriate.
*
* http://austindavid.com/wiiceiver
*
* latest software: https://github.com/jaustindavid/wiiceiver
* schematic & parts: http://www.digikey.com/schemeit#t9g
*
* Enjoy! Be safe!
*
* (CC BY-NC-SA 4.0) Austin David, austin@austindavid.com
* 12 May 2014
*
*/
#include <avr/wdt.h>
#include <Wire.h>
#include <Servo.h>
#include <EEPROM.h>
#define WIICEIVER_VERSION "1.2.2"
// addys for vars stored in EEPROM
#define EEPROM_Y_ADDY 0
#define EEPROM_AUTOCRUISE_ADDY 1
#define EEPROM_WDC_ADDY 2
#define DEBUGGING
#include "Blinker.h"
// #define DEBUGGING_CHUCK
// #define DEBUGGING_CHUCK_ACTIVITY
#define WII_ACTIVITY_COUNTER 100 // once per 20ms; 50 per second
#include "Chuck.h"
// #define DEBUGGING_ESC
#include "ElectronicSpeedController.h"
// #define DEBUGGING_SMOOTHER
#define SMOOTHER_MIN_STEP 0.003 // minimum change for smoothing; 0.003 for ~1s, 0.001 for ~2s
#define SMOOTHER_BRAKES_PROGRAM 0
#define SMOOTHER_THROTTLE_PROGRAM 1
#define SMOOTHER_THROTTLE_Z_PROGRAM 2
#define SMOOTHER_CRUISE_RESUME_PROGRAM 3
#include "Smoother.h"
// #define DEBUGGING_THROTTLE
#define THROTTLE_MIN 0.05 // the lowest throttle to send the ESC
#define THROTTLE_CC_BUMP 0.003 // CC = 0.2% throttle increase; 50/s = 10s to hit 100% on cruise
#define THROTTLE_MIN_CC 0.05 // minimum / inital speed for cruise crontrol
// note that a different value may be stored in EEPROM
#define THROTTLE_CRUISE_RETURN_MS 5000 // time (ms) when re-grabbing cruise will use the previous CC level
#include "Throttle.h"
// #define DEBUGGING_PINS
#include "pinouts.h"
Chuck chuck;
ElectronicSpeedController ESC;
Blinker green, red;
Throttle throttle;
float denominator;
float r1 = 120000;
float r2 = 27000;
int led1 = 2;
int led2 = 3;
int led3 = 4;
int led4 = 5;
int led5 = 12;
float vMax = 24.8;
float vMin = 19.8;
float v2 = (vMax-((vMax-vMin)/4));
float v3 = (vMax-2*((vMax-vMin)/4));
float v4 = (vMax-3*((vMax-vMin)/4));
int count = 0;
int flash = 0;
int buzzer = 13;
void voltage() {
if (count >= 50){
float vP;
vP = analogRead(0);
vP = vP * (4.875/1024);
Serial.println(vP);
vP = vP/denominator;
Serial.print("Volts: ");
Serial.println(vP);
if (vP > vMax)
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
digitalWrite(led5, HIGH);
digitalWrite(buzzer, LOW);
}
if ((vP > v2) && (vP < vMax))
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, HIGH);
digitalWrite(led5, LOW);
digitalWrite(buzzer, LOW);
}
if ((vP > v3) && (vP < v2))
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, HIGH);
digitalWrite(led4, LOW);
digitalWrite(led5, LOW);
digitalWrite(buzzer, LOW);
}
if ((vP > v4) && (vP < v3))
{
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
digitalWrite(led5, LOW);
digitalWrite(buzzer, LOW);
}
if ((vP > vMin) && (vP < v4))
{
digitalWrite(led1, HIGH);
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
digitalWrite(led5, LOW);
digitalWrite(buzzer, LOW);
}
if (vP < vMin)
{
if (flash >= 1) {
digitalWrite(led1, LOW);
digitalWrite(buzzer, LOW);
flash =0;
} else {
digitalWrite(led1, HIGH);
digitalWrite(buzzer,HIGH);
flash ++;
}
digitalWrite(led2, LOW);
digitalWrite(led3, LOW);
digitalWrite(led4, LOW);
digitalWrite(led5, LOW);
}
count = 0;
}
count ++;
}
/********
* WATCHDOG STUFF
* I referenced the following:
* http://forum.arduino.cc/index.php?topic=63651.0
* http://tushev.org/articles/arduino/item/46-arduino-and-watchdog-timer
* http://www.ivoidwarranties.com/2012/02/arduino-mega-optiboot.html
*
********/
/*
* setup a watchdog timer for the given reset interval
*
* constants: WDTO_250MS, WDTO_8S, WDTO_60MS, etc
*/
void watchdog_setup(byte wd_interval) {
wdt_reset();
wdt_enable(wd_interval);
cli();
WDTCSR |= (1<<WDCE) | (1<<WDE) | (1<<WDIE);
sei();
} // watchdog_setup(unsigned int wd_interval)
// increment a _W_atch _D_og _C_ounter stored in EEPROM, for future debugging
ISR(WDT_vect) {
byte wdt_counter = EEPROM.read(EEPROM_WDC_ADDY);
EEPROM.write(EEPROM_WDC_ADDY, wdt_counter + 1);
} // ISR for the watchdog timer
// display the current watchdog counter
void display_WDC(void) {
byte wdt_counter = EEPROM.read(EEPROM_WDC_ADDY);
Serial.print("Watchdog Resets: ");
Serial.println((byte)(wdt_counter + 1));
} // display_WDC()
// maybe calibrate the joystick:
// read the C button 250 times, once per 20ms (5s total); if it's constantly
// down, calibrate the joystick
void maybeCalibrate(void) {
int ctr = 0;
int i = 0;
for (i = 0; i < 10; i++) {
chuck.update();
delay(10);
}
if (chuck.C != 1 || ! chuck.isActive()) {
return;
}
red.update(10);
green.update(10);
i = 0;
#define C_COUNT 50
while (i <= C_COUNT && chuck.C) {
chuck.update();
red.run();
green.run();
i++;
ctr += chuck.C;
delay(20);
}
#ifdef DEBUGGING
Serial.print("C ctr = ");
Serial.println(ctr);
#endif
if (ctr >= C_COUNT && chuck.isActive()) {
chuck.calibrateCenter();
chuck.writeEEPROM();
// side effect: reset the WDC
EEPROM.write(EEPROM_WDC_ADDY, 255);
Serial.println("Calibrated");
}
red.update(1);
green.update(1);
} // void maybeCalibrate()
\
// an unambiguous startup display
void splashScreen() {
int i;
digitalWrite(pinLocation(GREEN_LED_ID), HIGH);
digitalWrite(pinLocation(RED_LED_ID), HIGH);
delay(250);
for (i = 0; i < 5; i++) {
digitalWrite(pinLocation(GREEN_LED_ID), HIGH);
digitalWrite(pinLocation(RED_LED_ID), LOW);
delay(50);
digitalWrite(pinLocation(GREEN_LED_ID), LOW);
digitalWrite(pinLocation(RED_LED_ID), HIGH);
delay(50);
}
digitalWrite(pinLocation(GREEN_LED_ID), HIGH);
digitalWrite(pinLocation(RED_LED_ID), HIGH);
delay(250);
digitalWrite(pinLocation(GREEN_LED_ID), LOW);
digitalWrite(pinLocation(RED_LED_ID), LOW);
} // void splashScreen(void)
// flash the LEDs to indicate throttle position
void updateLEDs(Throttle throttle) {
if (throttle.getThrottle() == 0) {
green.update(1);
red.update(1);
} else {
int bps = abs(int(throttle.getThrottle() * 20));
if (throttle.getThrottle() > 0) {
green.update(bps);
red.update(1);
} else {
green.update(1);
red.update(bps);
}
}
} // updateLEDs(float throttle)
// the nunchuck appears to be static: we lost connection!
// go "dead" for up to 5s, but keep checking the chuck to see if
// it comes back
void freakOut(void) {
unsigned long targetMS = millis() + 5000;
bool redOn = false;
byte blinkCtr = 0;
#ifdef DEBUGGING
Serial.print(millis());
Serial.println(": freaking out");
#endif
red.stop();
green.stop();
while (!chuck.isActive() && targetMS > millis()) {
// while (targetMS > millis()) {
if (blinkCtr >= 4) {
blinkCtr = 0;
if (redOn) {
red.high();
green.low();
redOn = false;
}
else {
red.low();
green.high();
redOn = true;
}
}
blinkCtr ++;
chuck.update();
delay(20);
wdt_reset();
}
green.start(1);
red.start(1);
} // void freakOut(void)
void setup_pins() {
/*
pinMode(ESC_GROUND, OUTPUT);
digitalWrite(ESC_GROUND, LOW);
pinMode(WII_GROUND, OUTPUT);
digitalWrite(WII_GROUND, LOW);
*/
pinMode(pinLocation(WII_POWER_ID), OUTPUT);
digitalWrite(pinLocation(WII_POWER_ID), HIGH);
pinMode(pinLocation(WII_SCL_ID), INPUT_PULLUP);
pinMode(pinLocation(WII_SDA_ID), INPUT_PULLUP);
} // setup_pins()
// wait up to 1s for something to happen
bool waitForActivity(void) {
unsigned long timer = millis() + 1000;
#ifdef DEBUGGING
Serial.print(millis());
Serial.print(" Waiting for activity ... ");
#endif
chuck.update();
while (! chuck.isActive() && timer > millis()) {
wdt_reset();
delay(20);
chuck.update();
}
#ifdef DEBUGGING
Serial.print(millis());
Serial.println(chuck.isActive() ? ": active!" : ": not active :(");
#endif
return chuck.isActive();
} // bool waitForActivity()
// dead code?
void stopChuck() {
#ifdef DEBUGGING
Serial.println("Nunchuck: power off");
#endif
digitalWrite(pinLocation(WII_POWER_ID), LOW);
delay(250);
#ifdef DEBUGGING
Serial.println("Nunchuck: power on");
#endif
digitalWrite(pinLocation(WII_POWER_ID), HIGH);
delay(250);
} // stopChuck()
// returns true if the chuck appears "active"
// will retry 5 times, waiting 1s each
bool startChuck() {
int tries = 0;
while (tries < 10) {
#ifdef DEBUGGING
Serial.print("(Re)starting the nunchuck: #");
Serial.println(tries);
#endif
wdt_reset();
chuck.setup();
chuck.readEEPROM();
tries ++;
if (waitForActivity()) {
return true;
}
}
return false;
} // startChuck()
// pretty much what it sounds like
void handleInactivity() {
watchdog_setup(WDTO_8S);
#ifdef DEBUGGING
Serial.print(millis());
Serial.println(": handling inactivity");
#endif
// lastThrottle = 0; // kills cruise control
// smoother.zero(); // kills throttle history
throttle.zero();
ESC.setLevel(0);
// this loop: try to restart 5 times in 5s; repeat until active
do {
freakOut();
if (! chuck.isActive()) {
// stopChuck();
// delay(250);
startChuck();
}
} while (! chuck.isActive());
// active -- now wait for zero
#ifdef DEBUGGING
Serial.print(millis());
Serial.println("Waiting for 0");
#endif
while (chuck.Y > 0.1 || chuck.Y < -0.1) {
chuck.update();
wdt_reset();
delay(20);
}
#ifdef DEBUGGING
Serial.print(millis());
Serial.println(": finished inactivity -- chuck is active");
#endif
watchdog_setup(WDTO_250MS);
} // handleInactivity()
void setup() {
wdt_disable();
Serial.begin(115200);
Serial.print("Wiiceiver v ");
Serial.print(WIICEIVER_VERSION);
Serial.print(" (compiled ");
Serial.print(__DATE__);
Serial.print(" ");
Serial.print(__TIME__);
Serial.println(")");
display_WDC();
green.init(pinLocation(GREEN_LED_ID));
red.init(pinLocation(RED_LED_ID));
setup_pins();
ESC.init(pinLocation(ESC_PPM_ID), pinLocation(ESC2_PPM_ID));
splashScreen();
// delay(5000); // hold for nunchuck powerup
#ifdef DEBUGGING
Serial.println("Starting the nunchuck ...");
#endif
green.high();
red.high();
if (startChuck()) {
maybeCalibrate();
} else {
handleInactivity();
}
#ifdef DEBUGGING
Serial.println("Nunchuck is active!");
#endif
throttle.init();
green.start(10);
red.start(10);
green.update(1);
red.update(1);
watchdog_setup(WDTO_250MS);
denominator = r2 / (r1 + r2);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
pinMode(led4, OUTPUT);
pinMode(led5, OUTPUT);
pinMode(buzzer, OUTPUT);
Serial.println("Voltage Values:");
Serial.println(vMax);
Serial.println(v2);
Serial.println(v3);
Serial.println(v4);
Serial.println(vMin);
Serial.println("BEGIN");
digitalWrite(buzzer, LOW);
} // void setup()
void loop() {
static float lastThrottleValue = 0;
unsigned long startMS = millis();
wdt_reset();
green.run();
red.run();
chuck.update();
// for forcing a watchdog timeout
#undef SUICIDAL_Z
#ifdef SUICIDAL_Z
if (chuck.Z) {
Serial.println("sleepin' to reset");
delay(9000);
} // suicide!
#endif
if (!chuck.isActive()) {
#ifdef DEBUGGING
Serial.println("INACTIVE!!");
#endif
handleInactivity();
} else {
float throttleValue = throttle.update(chuck);
ESC.setLevel(throttleValue);
if (throttleValue != lastThrottleValue) {
updateLEDs(throttle);
#ifdef DEBUGGING
Serial.print("y=");
Serial.print(chuck.Y, 4);
Serial.print(", ");
Serial.print("c=");
Serial.print(chuck.C);
Serial.print(", z=");
Serial.print(chuck.Z);
Serial.print(", ");
Serial.println(throttleValue, 4);
#endif
lastThrottleValue = throttleValue;
}
int delayMS = constrain(startMS + 21 - millis(), 5, 20);
#ifdef DEBUGGING_INTERVALS
Serial.print("sleeping ");
Serial.println(delayMS);
#endif
delay(delayMS);
} // if (chuck.isActive())
voltage();
}It's not very pretty but it works... or so I thought. Running the board upside down it seems to work (I noticed that sometimes when at full power the voltage will drop and an led would go out)
However, when I ride it, it will be fine up until I reach full speed, when the board will cut out and not respond to anything for a few seconds before kicking back in. This happens regularly, and I also notice that as I increase speed the led's will go out one by one. That seems like a massive voltage drop.
Just wondering if I could get some help on this, maybe some of my code is bad and interfering?
Cheers!!!