Hello!
Some time ago I asked for something slow turning, high efficenicy motor in this thread http://endless-sphere.com/forums/viewtopic.php?f=30&t=53769...barly got any answers. I think there is'nt such a motor out there.
Some words to the project: I'm going to build a Human Powered Serial Hybrid Vehicle (Going from HPV to HPSHV). Generator, little storage device, and two wheel drive. I know, that this is not making any sense in terms of efficiency for a normal bike or trike. But you will later on see my points for building such a hybrid drive.
Here are my requirements:
0 - 1000 rpm 20Nm 10sec, 15Nm for 5min, 10Nm countinously
typical loadpoints are:
rpm W_mech_out Bat_Out @ 50V w/o eff cal.
300 rpm 20W -0,5A
500 rpm 50W -1A
700 rpm 100W -2A
900 rpm 200W -4A
and worst case loadpoint are:
100 rpm 150W -3A ( more 4,5A with realistic eff.)
1000 rpm -750W +15A (yeah, breaking down the thing)
direct drive for eff and weight
average power Input 200W for typical humans, 300W for trained humans
hybrid storage energy 10Wh to play with add power and recuperate and do some other nice stuff
55V max System voltage
2kg per motor, so 6kg together
peak complete hybrid drive efficiency 85%
I hopped, that I could use or adept something like Miles Inrunner. My Intension was to mount 2 inrunners in the middle of the vehicle and drive the wheels directly with a drive shaft. I rebuilt Miles Inrunner in Emetor and played with it to reach my requirements (I hope this ok ?!? ), but it didn't work. This thing was to small to mount enough magnets to achieve a usefull electric frequency, getting to long for Nm req. and finally getting unwindable.
First lessions learned: slow turing makes electric motors heavy, longer and/or bigger in diameter. Transmissions and drive shaft bring weight and cost eff. So back to school...getting more deep understanding of electric motors.
Results: skip the drive shaft, taking it's 300g weight for 20Nm application, put it into the motor. Skip the inrunner concept, make an outrunner for 48 magnet poles.
So here we are: I Need a small HUB MOTOR. Oh no...I always thought, they are big, heavy, inefficent. But with the right design...
Here is, what i've done so far:
144mm Outrunner (got diameter to built with standard semi-manufactored metal parts)
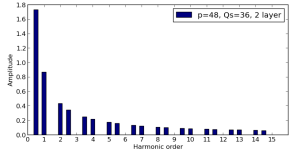
36 Slots, 48 magnets
20mm active length (scalable for "real" hubs, I will built a 40mm version along with the 20mm)
20 turns wind
2x1mm recangular wire with 0,5mm edge radius will give 1,785mm² copper per turn. I got a complete winding stratigie in mind.
1 mm air gap
N35h 6,5 x 3 x 20mm epoxy coating (even got a quote here in Germany: 0,48€ per Piece for N40h. Did it only for interest and they answered very fast...)
1600g for parallel tooth or 1780g for parallel slots active mass
very low flux concept to keep iron losses low. this makes only sense for my special application.
You can have a look @ the attached emetor file. I used the 1A100rpm load point to optimise tooth tip, magnet size and torque ripple. If all electric parameters are fixed, I'm going to make some non-linar runs in emetor for higher loads and a high flux density version for real hub application. In 2 weeks, i will start the CAD construction.
I got some question while playing with the desgin:
- back emf counters torque rippel ... any explanation for that? I have done sims with widening the magnets, the back emf becomes quite sinus like
- any idea to reduce iron loses further?
- does it make sense to give all the edges within the slots a radius for better flux distribution?
Some stupid questions from old "knowlegde":
- RC Outrunners have no lam iron on the rotor, but the have really high rpms, so why?
- still use paper between the lams or coat the lams?
Some questions getting the parts:
- lamination laser cutting: one i got from Miles' Inrunner build tread, any other company to ask?
- do you know anyone here in europe, that can make 2 axis and turing CNC parts from aluminium and steel?
- please advice which FOC controller for this low power application to take, especially for the generator part
F4P
Some time ago I asked for something slow turning, high efficenicy motor in this thread http://endless-sphere.com/forums/viewtopic.php?f=30&t=53769...barly got any answers. I think there is'nt such a motor out there.
Some words to the project: I'm going to build a Human Powered Serial Hybrid Vehicle (Going from HPV to HPSHV). Generator, little storage device, and two wheel drive. I know, that this is not making any sense in terms of efficiency for a normal bike or trike. But you will later on see my points for building such a hybrid drive.
Here are my requirements:
0 - 1000 rpm 20Nm 10sec, 15Nm for 5min, 10Nm countinously
typical loadpoints are:
rpm W_mech_out Bat_Out @ 50V w/o eff cal.
300 rpm 20W -0,5A
500 rpm 50W -1A
700 rpm 100W -2A
900 rpm 200W -4A
and worst case loadpoint are:
100 rpm 150W -3A ( more 4,5A with realistic eff.)
1000 rpm -750W +15A (yeah, breaking down the thing)
direct drive for eff and weight
average power Input 200W for typical humans, 300W for trained humans
hybrid storage energy 10Wh to play with add power and recuperate and do some other nice stuff
55V max System voltage
2kg per motor, so 6kg together
peak complete hybrid drive efficiency 85%
I hopped, that I could use or adept something like Miles Inrunner. My Intension was to mount 2 inrunners in the middle of the vehicle and drive the wheels directly with a drive shaft. I rebuilt Miles Inrunner in Emetor and played with it to reach my requirements (I hope this ok ?!?
First lessions learned: slow turing makes electric motors heavy, longer and/or bigger in diameter. Transmissions and drive shaft bring weight and cost eff. So back to school...getting more deep understanding of electric motors.
Results: skip the drive shaft, taking it's 300g weight for 20Nm application, put it into the motor. Skip the inrunner concept, make an outrunner for 48 magnet poles.
So here we are: I Need a small HUB MOTOR. Oh no...I always thought, they are big, heavy, inefficent. But with the right design...
Here is, what i've done so far:
144mm Outrunner (got diameter to built with standard semi-manufactored metal parts)
36 Slots, 48 magnets
20mm active length (scalable for "real" hubs, I will built a 40mm version along with the 20mm)
20 turns wind
2x1mm recangular wire with 0,5mm edge radius will give 1,785mm² copper per turn. I got a complete winding stratigie in mind.
1 mm air gap
N35h 6,5 x 3 x 20mm epoxy coating (even got a quote here in Germany: 0,48€ per Piece for N40h. Did it only for interest and they answered very fast...)
1600g for parallel tooth or 1780g for parallel slots active mass
very low flux concept to keep iron losses low. this makes only sense for my special application.
You can have a look @ the attached emetor file. I used the 1A100rpm load point to optimise tooth tip, magnet size and torque ripple. If all electric parameters are fixed, I'm going to make some non-linar runs in emetor for higher loads and a high flux density version for real hub application. In 2 weeks, i will start the CAD construction.
I got some question while playing with the desgin:
- back emf counters torque rippel ... any explanation for that? I have done sims with widening the magnets, the back emf becomes quite sinus like
- any idea to reduce iron loses further?
- does it make sense to give all the edges within the slots a radius for better flux distribution?
Some stupid questions from old "knowlegde":
- RC Outrunners have no lam iron on the rotor, but the have really high rpms, so why?
- still use paper between the lams or coat the lams?
Some questions getting the parts:
- lamination laser cutting: one i got from Miles' Inrunner build tread, any other company to ask?
- do you know anyone here in europe, that can make 2 axis and turing CNC parts from aluminium and steel?
- please advice which FOC controller for this low power application to take, especially for the generator part
F4P