I spent some money and bought credits for the simulator at http://www.emetor.com/
(You can try it for free, but it only will simulate with linear materials, i.e. without saturation.)
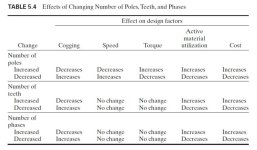
In another thread I found dimensions for the stator and rotor of the ca120, measured by toolman2. I put those dimensions in the simulator, with a 60mm width, because I read somewhere that the colossus has the same stator as ca120, but with twice the width (however, dimensions doesn't match the drawings in the sale thread of the colossus). I also put 4mm back iron on rotor (instead of 1.75mm), because I noticed that the back iron was saturating, and I thought (hoped) that maybe the colossus will have a thicker back iron than ca120. Thickest stator sheets available in simulator was 0,27mm thick Sura NO27, so a bit thinner than 0,35mm, which means the iron losses will not match reality.
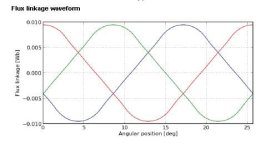
I simulated with 20 and 28 magnets at 3000rpm. I only got a "no load simulation" to work, so I could not try different currents with load to see what would happen. I will report back if I get the "load simulation" to work. I can give you my setup files for the simulator if you are interested. Attached are the results of my simulations with 4mm back iron. (edit, I also added the ones with 1.75mm back iron)
Short story: (which doesn't tell the whole story, because the BEMF shape has some interesting differences)
Code:
Motor Fundamental peak phase back-EMF:
20p 1.75mm iron 31.37V
20p 4.00mm iron 35.00V
28p 1.75mm iron 38.12V
28p 4.00mm iron 40.21V