
stancecoke
Minor legend
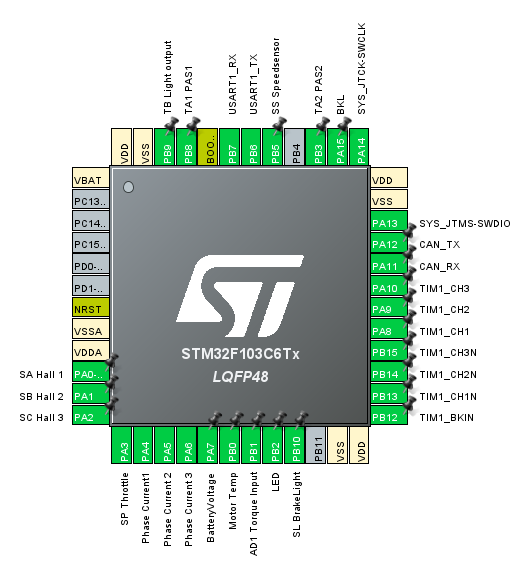
Lishui uses strict processor pin definitions. The processor pins are routed to solderpads on the PCB. Not all solderpads are wired normally, as the customer orders. If a wire is missing, you can solder it in, but you have to remove the potting....

")
