I have a bike that's close to this design. I've been thinking about doing a Kickstarter project to see if there was interest in the mid-drive approach.
I have a freewheel on the bottom bracket and a MAC like motor with a planetary reduction.
Here are some rough specs:
300 W
24 V, 12 Ah battery
Geared low for hill climbing so top speed is ~18 mph. Low gear top speed is ~5 mph. Personally I prefer the mountain gearing but if flats and speed were preferred I could adjust accordingly, however, I would hit a motor power limit fairly quickly which would require some beefier gears (to hit speeds in the 30 mph range).
~20 mile range
On trek 4200 weight is 42 lbs with battery
The gears are tuned to pedal cadence.
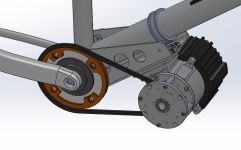
I've made a few revisions of this basic setup. The latest adapts to the bottom bracket and I'm in the process of assembling this version. The version I currently ride required me to weld some tabs to the down tube. I've put lots of miles on this version.
It's a tough setup. I take it on trails and bash it hard. I love it, though it's not without shortcomings.
I would like to switch to an IGH hub, and I have had some cassettes lose teeth due to late shifts while under full power.
Also pictured are my very original version with a chain drive. It was loud but still surprisingly reliable. I put ~4000 miles on that setup. The CAD is for the current build I'm working on.
I have a freewheel on the bottom bracket and a MAC like motor with a planetary reduction.
Here are some rough specs:
300 W
24 V, 12 Ah battery
Geared low for hill climbing so top speed is ~18 mph. Low gear top speed is ~5 mph. Personally I prefer the mountain gearing but if flats and speed were preferred I could adjust accordingly, however, I would hit a motor power limit fairly quickly which would require some beefier gears (to hit speeds in the 30 mph range).
~20 mile range
On trek 4200 weight is 42 lbs with battery
The gears are tuned to pedal cadence.
I've made a few revisions of this basic setup. The latest adapts to the bottom bracket and I'm in the process of assembling this version. The version I currently ride required me to weld some tabs to the down tube. I've put lots of miles on this version.
It's a tough setup. I take it on trails and bash it hard. I love it, though it's not without shortcomings.
I would like to switch to an IGH hub, and I have had some cassettes lose teeth due to late shifts while under full power.
Also pictured are my very original version with a chain drive. It was loud but still surprisingly reliable. I put ~4000 miles on that setup. The CAD is for the current build I'm working on.



 The 50cc turnigy rotomax seems to be perfect. There is just much rework to be done
The 50cc turnigy rotomax seems to be perfect. There is just much rework to be done