
Sharkboat
100 mW
My goal is to create an efficient electric vehicle. Efficiency can be defined in a lot of ways, but the most convenient for me is in Wh/mi.
I am looking for some advice on ways to increase the efficiency of an electric drive system.
---Background Info----
Efficiency depends on a lot of variables, making a simple comparison difficult. The best way to increase efficiency is to decrease the forces acting against the vehicle.
The rolling resistance Fr=fr*M*g where fr is the rolling resistance coefficient, M is the mass (kg) and g is 9.81 (m/s^2).
The rolling resistance of the vehicle can be reduced by reducing the weight of the vehicle and using low rolling resistance tires and bearings.
The aerodynamic drag Fa=1/2*rho*A*cx*v^2 where rho is the air density (1.2 kg/m^3), v is the velocity of the vehicle (m/s), cx is the aerodynamic drag coefficient, and A is the reference area (either frontal area or wetted area)
Aerodynamic drag can be reduced by making the vehicle smaller, maintaining laminar flow (decreasing the drag coefficient), and by driving slow. The aerodynamic drag is proportional to the velocity squared. This force dominates the forces acting against the vehicle at speeds above 15 mph.
The uphill drag force Fu=0.01Mgp (for gradients up to p<20%) where p is the incline gradient of the road (%)
The Acceleration drag Fa=M* acceleration (m/s^2)
----Efficient Vehicles----
1) Pac-Car II: Efficiency 2.9 Wh/mi @ 15 mph, Motor: 2 Maxon motors (150 watts, $1000 a piece) One used for acceleration, one for cruising. Direct drive gear transmission.
2) Quest velomobile with Ecospeed mid drive: 10 Wh/mi.
http://endless-sphere.com/forums/viewtopic.php?f=6&t=17251
3) Shumaker E-Catrike 700: 14 wh/mi @ 20 mph (no pedaling), Astro 3220 7 turn 48 volt. http://www.recumbents.com/wisil/shumaker/ct700/default.htm
In order to predict the efficiency of an electric motor drive system, you need to know the power requirements, which are dependent on how the vehicle is driven (velocity and acceleration)
For a Quest velomobile you would need 250 watts at 30 mph, and 500 watts at 45 mph. (not including acceleration or hills)
For a mountain bike you would need 900 watts at 30 mph and 3000 watts at 45 mph.
As you can see, aerodynamics and speed play a huge role on the power consumption at constant velocity.
Mass only affects the required power during hills and acceleration.
This calculator can be used to determine the speed of the vehicle at a given power.
http://www.kreuzotter.de/english/espeed.htm
This program can be used to determine the efficiency of the motor:
http://www.drivecalc.de/
----Electric Drive system----
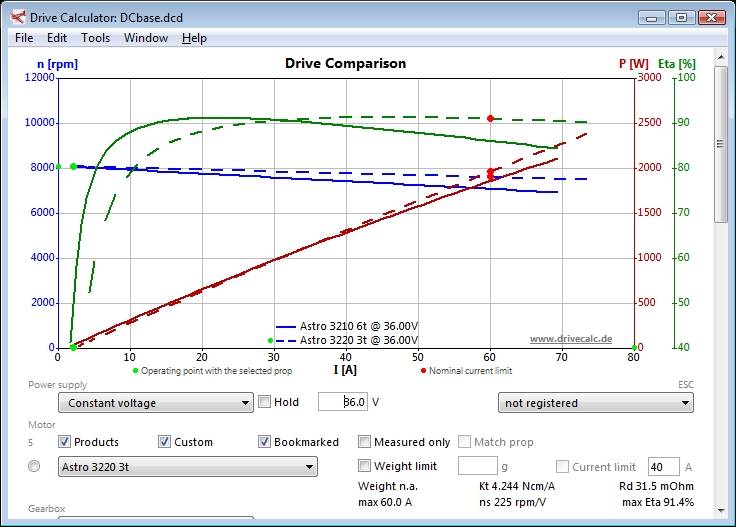
The green line is the efficiency of an Astro 3220 4 turn motor at 48 volt. It is above 90% efficient from about 900 Watts to about 1500 Watts, and between 8000 rpm and 7500 rpm.
At low power, the efficiency drops off very quickly.
Increasing the voltage increases the efficiency and also increases the rpm of the motor. 50 volts is the limit for the HV 160 controller. Using a 3 turn motor at 48 volts will increase the efficiency range, but will also increase the rpm of the motor to around 10,000.
The EcoSpeed system is very efficient and uses a planetary gear hub for the primary reduction, then acts as a mid drive, turning the crank so that it can see all of the gears of the bike.
This website shows information about how using gears increases the efficiency of the drive system http://ecospeed.com/emddet.html
----Hypothesis----
My hypothesis is that using two different electric motors, one for accelerating or high power demands, and one for cruising, or low power demands, combined with the optimum gearing, would provide the most efficient electric drive system, just like the PAC-Car II.
I also think that volting up and gearing down the 3220 will be the most efficient option.
I plan on using an astro 3220 3 turn at 48 volt from 1500 W to around 4700 W with a 7:1 Matt S belt reduction as the primary drive, and a secondary fixed chain reduction on the left side.
In addition, a 3 turn astro 3210 at 28 volt from 500 W to 1500 W at around 6000 rpm.
This motor would use a neugart planetary gear box, then a chain to the rear wheel (right side) with a nexus 3 speed dual drive gear hub. A typical efficiency loss in a planetary gearbox arrangement is only 3% per stage.
Using a 3 speed gear hub would increase the efficiency while cruising at high speed. If the 3220 used the nexus it would most likely break it, due to the high torque of the larger motor.
The 3220 has a large power band and doesn’t necessarily need multiple gears. The only possible gear system that could handle the high torque of the 3220 would be a thud style 2 speed transmission.
---Possible Problems---
*An astro 3220 running at 10,000 rpm is very fast, this could create a lot of noise. This would also require greater reduction. Increasing the reduction decreases the efficiency of the transmission.
*Using 2 motors and 2 motor controllers greatly increases the cost and complexity of the system.
* Would it be possible to use 1 throttle to control both motors?
*Would it be possible to use both electric motors simultaneously? Or would the difference in motor speeds interfere with each other?
---Questions---
Would Delta/Wye switching have any benefit on efficiency?
How does the throttle affect efficiency?
Would adding sensors to the motor have any benefit?
Would using a more advanced motor controller be beneficial?
Has anyone been able to get the updated version of this calculator to work?
http://www.endless-sphere.com/forums/viewtopic.php?f=2&t=6892&p=287797#p287797
I am looking for some advice on ways to increase the efficiency of an electric drive system.
---Background Info----
Efficiency depends on a lot of variables, making a simple comparison difficult. The best way to increase efficiency is to decrease the forces acting against the vehicle.
The rolling resistance Fr=fr*M*g where fr is the rolling resistance coefficient, M is the mass (kg) and g is 9.81 (m/s^2).
The rolling resistance of the vehicle can be reduced by reducing the weight of the vehicle and using low rolling resistance tires and bearings.
The aerodynamic drag Fa=1/2*rho*A*cx*v^2 where rho is the air density (1.2 kg/m^3), v is the velocity of the vehicle (m/s), cx is the aerodynamic drag coefficient, and A is the reference area (either frontal area or wetted area)
Aerodynamic drag can be reduced by making the vehicle smaller, maintaining laminar flow (decreasing the drag coefficient), and by driving slow. The aerodynamic drag is proportional to the velocity squared. This force dominates the forces acting against the vehicle at speeds above 15 mph.
The uphill drag force Fu=0.01Mgp (for gradients up to p<20%) where p is the incline gradient of the road (%)
The Acceleration drag Fa=M* acceleration (m/s^2)
----Efficient Vehicles----
1) Pac-Car II: Efficiency 2.9 Wh/mi @ 15 mph, Motor: 2 Maxon motors (150 watts, $1000 a piece) One used for acceleration, one for cruising. Direct drive gear transmission.
2) Quest velomobile with Ecospeed mid drive: 10 Wh/mi.
http://endless-sphere.com/forums/viewtopic.php?f=6&t=17251
3) Shumaker E-Catrike 700: 14 wh/mi @ 20 mph (no pedaling), Astro 3220 7 turn 48 volt. http://www.recumbents.com/wisil/shumaker/ct700/default.htm
In order to predict the efficiency of an electric motor drive system, you need to know the power requirements, which are dependent on how the vehicle is driven (velocity and acceleration)
For a Quest velomobile you would need 250 watts at 30 mph, and 500 watts at 45 mph. (not including acceleration or hills)
For a mountain bike you would need 900 watts at 30 mph and 3000 watts at 45 mph.
As you can see, aerodynamics and speed play a huge role on the power consumption at constant velocity.
Mass only affects the required power during hills and acceleration.
This calculator can be used to determine the speed of the vehicle at a given power.
http://www.kreuzotter.de/english/espeed.htm
This program can be used to determine the efficiency of the motor:
http://www.drivecalc.de/
----Electric Drive system----
The green line is the efficiency of an Astro 3220 4 turn motor at 48 volt. It is above 90% efficient from about 900 Watts to about 1500 Watts, and between 8000 rpm and 7500 rpm.
At low power, the efficiency drops off very quickly.
Increasing the voltage increases the efficiency and also increases the rpm of the motor. 50 volts is the limit for the HV 160 controller. Using a 3 turn motor at 48 volts will increase the efficiency range, but will also increase the rpm of the motor to around 10,000.
The EcoSpeed system is very efficient and uses a planetary gear hub for the primary reduction, then acts as a mid drive, turning the crank so that it can see all of the gears of the bike.
This website shows information about how using gears increases the efficiency of the drive system http://ecospeed.com/emddet.html
----Hypothesis----
My hypothesis is that using two different electric motors, one for accelerating or high power demands, and one for cruising, or low power demands, combined with the optimum gearing, would provide the most efficient electric drive system, just like the PAC-Car II.
I also think that volting up and gearing down the 3220 will be the most efficient option.
I plan on using an astro 3220 3 turn at 48 volt from 1500 W to around 4700 W with a 7:1 Matt S belt reduction as the primary drive, and a secondary fixed chain reduction on the left side.
In addition, a 3 turn astro 3210 at 28 volt from 500 W to 1500 W at around 6000 rpm.
This motor would use a neugart planetary gear box, then a chain to the rear wheel (right side) with a nexus 3 speed dual drive gear hub. A typical efficiency loss in a planetary gearbox arrangement is only 3% per stage.
Using a 3 speed gear hub would increase the efficiency while cruising at high speed. If the 3220 used the nexus it would most likely break it, due to the high torque of the larger motor.
The 3220 has a large power band and doesn’t necessarily need multiple gears. The only possible gear system that could handle the high torque of the 3220 would be a thud style 2 speed transmission.
---Possible Problems---
*An astro 3220 running at 10,000 rpm is very fast, this could create a lot of noise. This would also require greater reduction. Increasing the reduction decreases the efficiency of the transmission.
*Using 2 motors and 2 motor controllers greatly increases the cost and complexity of the system.
* Would it be possible to use 1 throttle to control both motors?
*Would it be possible to use both electric motors simultaneously? Or would the difference in motor speeds interfere with each other?
---Questions---
Would Delta/Wye switching have any benefit on efficiency?
How does the throttle affect efficiency?
Would adding sensors to the motor have any benefit?
Would using a more advanced motor controller be beneficial?
Has anyone been able to get the updated version of this calculator to work?
http://www.endless-sphere.com/forums/viewtopic.php?f=2&t=6892&p=287797#p287797
