
Bgt2u
1 W
- Joined
- May 31, 2020
- Messages
- 58
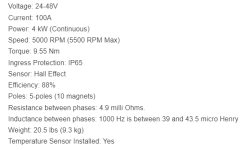
I have built an off road electric vehicle. I am using a 60v (60ah) battery, a Kelly KLS7260NG controller, and a Motenergy ME2009 motor. I do not have the specs on the motor, but have included specs on another motor, that is close. The differences are, my motor is rated 150 amps current versus 100, and handles up to 72v vs. 48. That being said, my problem is the motor was beeping when applying any throttle. I changed the Max Forward speed % from 100 to 80, and now it beeps when I apply maybe 1/2 throttle. I have enclosed screen shots of the controller settings. Yes, I changed the motor identify setting to 170, when first setting up the controller. So, my question is: Can anyone tell me what am I doing incorrectly, and how to fix it?








")