Reserved for doodle.
Buffering.
So, made a doodle.
Suffice to say, this is very much a australopithecus afarensis to what's to come. However, it does show what can be done with mechanical engineering software such as FreeCAD by a hooplehead as yours truly, while doing the laundry. I cheated a bit and I must add; its food for thought and not carved in stone and such and such. Now, FreeCAD is free, download it and give it a whirl.
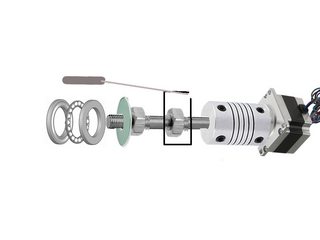
I used the dimensions from the first hit of a NEMA 14 stepper (5Ncm), which aught to be way more power than needed. (if anyone has the specs/dimensions of something more hm.. reasonable, I'm all ears.)
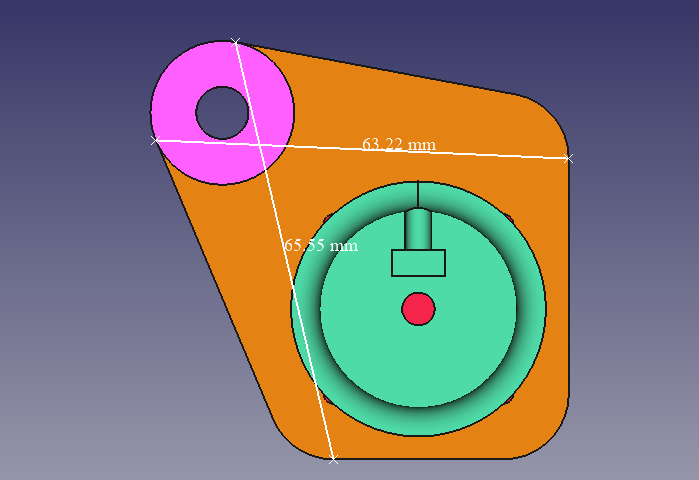
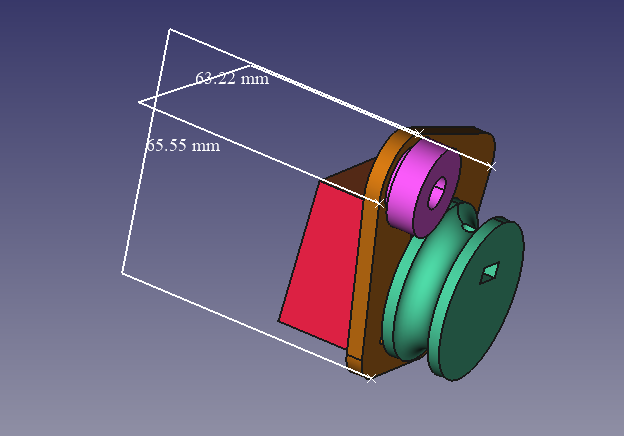
The pink part is a V-grooved 608 bearing, with a M8 washer. (cheated a bit there)
The turquoise part is a 3dprinted "spool" for the wire, fastened through the hole.
The orange part is the plate that's going to be fastened to the frame.
The red part is the NEMA14 stepper.
(Download the attached file and have a look in FreeCAD! Sorry had to zip it, because phpBB-forum settings)
View attachment Bluetooth Open Source Shifting System v.0.01.7z
If anyone would like to scribble down the relevant measurements of a frame, whatever part specs that could be used, and/or any ideas by all means, that would be helpful! The more info, the more we all got to ponder/work with!
I licensed it as GPLv3(as a statement of intent) AND as a homage to those wholesome titans of developers over at Flexible OpenSource firmware for TongSheng TSDZ2 mid drive motor!
Buffering.
So, made a doodle.
Suffice to say, this is very much a australopithecus afarensis to what's to come. However, it does show what can be done with mechanical engineering software such as FreeCAD by a hooplehead as yours truly, while doing the laundry. I cheated a bit and I must add; its food for thought and not carved in stone and such and such. Now, FreeCAD is free, download it and give it a whirl.
I used the dimensions from the first hit of a NEMA 14 stepper (5Ncm), which aught to be way more power than needed. (if anyone has the specs/dimensions of something more hm.. reasonable, I'm all ears.)
The pink part is a V-grooved 608 bearing, with a M8 washer. (cheated a bit there)
The turquoise part is a 3dprinted "spool" for the wire, fastened through the hole.
The orange part is the plate that's going to be fastened to the frame.
The red part is the NEMA14 stepper.
(Download the attached file and have a look in FreeCAD! Sorry had to zip it, because phpBB-forum settings)
View attachment Bluetooth Open Source Shifting System v.0.01.7z
If anyone would like to scribble down the relevant measurements of a frame, whatever part specs that could be used, and/or any ideas by all means, that would be helpful! The more info, the more we all got to ponder/work with!
I licensed it as GPLv3(as a statement of intent) AND as a homage to those wholesome titans of developers over at Flexible OpenSource firmware for TongSheng TSDZ2 mid drive motor!
") . So if anyone gets there mechanicals worked out I'm happy to make a cpu go and have it talk to our SW102 for the control/user interface/ebike integration.
. So if anyone gets there mechanicals worked out I'm happy to make a cpu go and have it talk to our SW102 for the control/user interface/ebike integration.