deVries
100 kW
Just bumping this thread in hopes someone will post that they completed one of these BLDC controllers (original or modded) or knows someone that did. Maybe someone has gone on to mod this original design & made some improvements too?hardym said:Thanks for all the great comments and the education on Caps. (I've never really understood why there are so many types of Caps).
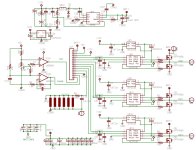
I've updated the image and Eagle files in the previous post (4 posts back, on Page 22 of this thread). Maybe this is not the kosher way to make updates, but it saves the littering of file versions throughout a thread. I think these are ready to for print. I'll probably get 6 PCBs made. If you want a PCB, send me a PM.
I'll upload a parts list soon.
Mark.
PS. Man, this takes the 'Simple' out of Simple BLDC Controller.
Jeremy is off ES not actively posting for now, since he is involved in building some kind of off-the-grid house or related project.
Does anyone know of anyone that has continued on with this BLDC project whether original or modded???
Please give an update to this thread or point us to a new thread of related interest.
Thanks!!!