Hi,
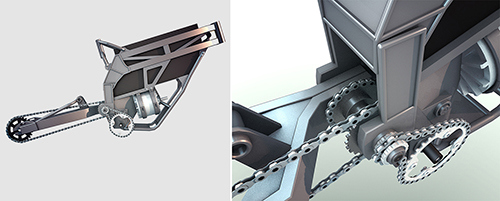
So I've build a concept for a small e bike, I have absolutely no experience in any of this, so i was curios how practical the design actually is.
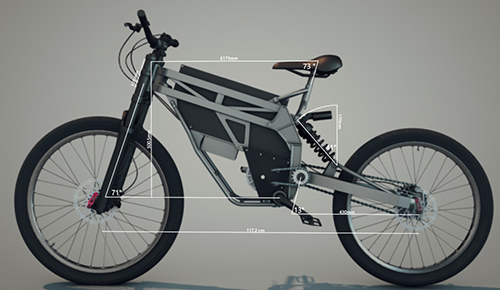
It's mostly modeled after a picture i've seen somewhere. I was however thinking of building it.
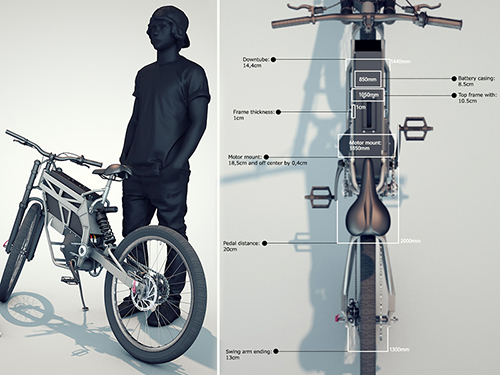
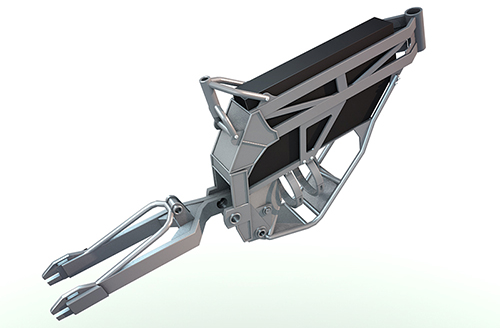
Like, will that custom swing arm work?
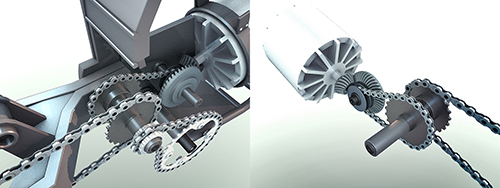
And what about the beveled gears on the motor?, I've never seen anyone do that.
There will be a power loss for sure, I guess..
I have a budget of 3000 euro (excluding the frame).
So here's what I know so far:
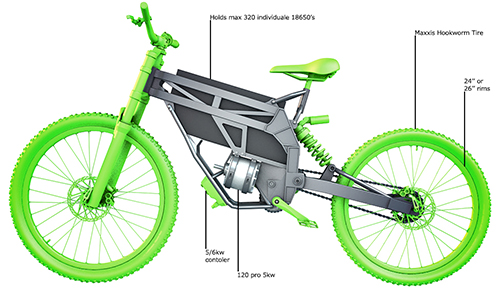
In the battery package fits about 300 (10850) size batteries . if i'm not mistaken that's something like 90v.
I mean if i got the space why not fill it all up. Little downside the battery will weight about 7 kilos...
I know someone how can build it and it would cost 1200 euro
A motor that I think would work nice in conjunction with that would be the; 'rv-120-pro-with-hall-sensors' (400 euros)
I would like to go with ether 24'' or 26'' rims, and like the; 'Maxxis Hookworm' as tires. (100 euros)?
That leaves me with 2300 euros for the rest of the components, is that at all possible?
As well as the frame, and gearing setup?
Can't wait to read some responses, good or bad!
Cheers,
Tim
So I've build a concept for a small e bike, I have absolutely no experience in any of this, so i was curios how practical the design actually is.
It's mostly modeled after a picture i've seen somewhere. I was however thinking of building it.
Like, will that custom swing arm work?
And what about the beveled gears on the motor?, I've never seen anyone do that.
There will be a power loss for sure, I guess..
I have a budget of 3000 euro (excluding the frame).
So here's what I know so far:
In the battery package fits about 300 (10850) size batteries . if i'm not mistaken that's something like 90v.
I mean if i got the space why not fill it all up. Little downside the battery will weight about 7 kilos...
I know someone how can build it and it would cost 1200 euro
A motor that I think would work nice in conjunction with that would be the; 'rv-120-pro-with-hall-sensors' (400 euros)
I would like to go with ether 24'' or 26'' rims, and like the; 'Maxxis Hookworm' as tires. (100 euros)?
That leaves me with 2300 euros for the rest of the components, is that at all possible?
As well as the frame, and gearing setup?
Can't wait to read some responses, good or bad!
Cheers,
Tim
")