I couldn't resist........ ")
Astro 60 brushless motor.
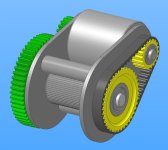
5M synchro belt and 1.5 Mod spur gears (large gear POM).
Two one-way bearings (in opposition) on the motor shaft. Two one-way bearings on the roller shaft.
Reductions: 1.9:1 (belt) & 3:1 (spur gears)
Gear range: 158%
Pivoting mech. still to work out....
Astro 60 brushless motor.
5M synchro belt and 1.5 Mod spur gears (large gear POM).
Two one-way bearings (in opposition) on the motor shaft. Two one-way bearings on the roller shaft.
Reductions: 1.9:1 (belt) & 3:1 (spur gears)
Gear range: 158%
Pivoting mech. still to work out....