nieles
10 kW
arlo, could you post a dyno plot with x-axis, torque (at the wheel) and y-axis wheel rpm.
awesome vids by the way!
awesome vids by the way!
nieles said:arlo, could you post a dyno plot with x-axis, torque (at the wheel) and y-axis wheel rpm.
awesome vids by the way!
")
I will see what I can do to get set up for dyno testing and changing settings here asap. I have a pro motocross friend out from alberta visiting and I have to build his race motor for him.Lebowski said:can you post a torque/horse power plot like that with and without the FOC ? (so in the FOC menu use option a to turn it on and off)
Or .....Lebowski said:Arlin, just a thought... what you're doing now is staying at 20s and slowly increase the phase amps, all while keeping
an eye on the voltage spikes. What is also a method is to go to 12s (so 50V), and up the phase amps quickly. The lower
battery voltage allows for bigger spikes. It'll give you an idea how the spike change when you go to 200, 250, 300 phase amps.
Then when you're confident you can up the voltage to 16s and then 20s
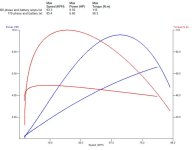
. I upped the power while watching the scope and the spike stayed at the 100v mark all the way up to 300 phase amps. Dynoed 9.55 RWHP and 93 ft/lbs torque. Then a test ride and its quite quick!. (the controller IC, not you Arlin... well you too but you're...) very nice results Arlin ! Thanks.Lebowski said:I'm so proud of my baby
Yeslebowski said:Are you now using the capacitor / resistor series network in the gate-drain like I posted a few pages ago ?
Hey before you go... Im only running 100% Im afraid of anything over. I blew the last powerstage design (4110 18 fet) simply from going to 110% from 100 % at 150 phase amps.In the last graph, the dramatic drop in torque from about 60kmh suggests the controller is providing maximum
voltage and your current is limited by LiPo sag and system internal resistance. Did you try to go over 100% amplitude ?
The current chip you have starts going into trapezoidal waveforms when you go above 100% (when it starts chopping
off the tops of the sine waves). Because of the really crappy easter weather I've been updating the chip, I
added moving mid-point which allows you to go to 112% before the sine tops are flattened and it goes to
trapezoidal...
When you got to buy a controller like you got now from Sevcon you're easely in the $1000 ...
Now to figure out how to insure this thing.But would it not make sense to add a rpm based starting point. I meen if you have say 300 phase amps limit and you are under a phase amp limit untill say 3000 rpm then if you add cliping to anything below 3000 rpm you will just make it more efficient. Or are you saying it will still try to use FOC and the center aligend pwm to feed the power in at the center of the back emf to make the motor the same efficicncy up to say 3000 rpm where there is no longer a limit on the phase amps?Lebowski said:If you're afraid of going over 100%, try 12s lipo and slowly go over 100% while keeping an eye on the waveforms...
There's no rpm control over when the trapezodial starts. The way it works is, the chip basically raises or lowers
the amplitude of the output sine waves to achieve the phase current the rider sets with the throttle. The 100%
setting means that the chip won't raise the output voltage any further than so and so much. There's no link with the rpm,
it all depends on the throttle. When the chip won't raise the voltage anymore, with an increase of speed / backemf the
current / torque starts to drop off. By going to more than 100% the chip will squeeze a bit more voltage out of the controller,
meaning it will maintain the higher current / torque for longer...
No I did not scope it properly. I did not understand what the spikes were.When you blew up the last time, did you have the spikes under control like you do now ?
Yes this is what I am saying.Lebowski said:Trapezoidal waveforms will reduce the efficiency when compared to sine waveforms, so you want to
postpone using trapezoidal until it's the only way to achieve the phaseAmps.
I will spend some time doing some quick testing but I think the dead time at ~1800ns starts to raise the battery current so I set it to 2100ns to be safe.Lebowski said:Some things which I've found raise efficiency / speed:
- short deadtime. Long deadtime reduces the voltage the controller can provide, especially when limiting amplitude to 100%
- higher PWM frequency gives less current ripple and reduces losses in the motor (but increase them in the driver stage / output stage)
There is a zip file posted in the same post with the screenshot a couple pages back. I will try to post it againg later.Lebowski said:I'm still wondering whether it's your inbetween stage that's causing the long deadtime, and whether you actually need this stage. Maybe you'd be better off without it.
Can you post a (readable) schematic with resistor / capacitor values ?
When you're doing the dyno-ing, please also a comparison run with / without FOC.
I have not updated the SCH file. I had them backwards on the SCH file.Lebowski said:I'm very curious to see the schematics of the current setup. Especially since the
gate diodes in the schematic of a few pages ago are in reverse and would actually
make it very difficult to keep the transistors off. With the way they're in that schematic
you're set for low-gate-resistor turn on and high-gate-resistor turn off.