
Avitt
100 W
I'll preface this by saying that I don't use a throttle, and I've been pretty happy with the Torque Simulation PAS mode on my bike:
http://endless-sphere.com/forums/viewtopic.php?f=6&t=58335
But I've been itching to try a true torque sensor, to overcome a couple of small shortcomings of the PAS. Namely,
My options for a torque sensor are limited. I can't use a BB sensor, because I have a Patterson Metropolis Transmission two-speed crankset. So when I came across the BEAMts sensor from Santa Monica Electric Vehicles, I was eager to give it a try. Unfortunately, they're not so available, and it took me about 6 months to track one down (thanks to a reference by member green79): http://www.usaebikes.com/shop/beamts-pedal-assist-torque-sensor
This is the Prodecotech version, which is wired to plug and play with their bikes. It comes with a bottom bracket mount. So the wiring and the mount would have to be adapted for my bike.
One of the nice features of this torque sensor is the way that it does not require a Cycle Analyst to interpret the signal. Instead, it outputs a throttle level signal, which can be fed directly into any controller. The Prodecotech version of the BEAMts has a pass though connector, which allows you to plug in your throttle. (This was nice for me, because I use the throttle voltage to trigger a relay which controls my lights.)
It took me a while to figure out the wiring. There are three connectors:
I had to change the gender, and convert the 4-pin to 3-pin connectors. Then it plugged right into my controller...And worked!
The mount had to be adapted to work with the Metropolis Transmission. My solution was to cut the bracket, and mount it to the back of the Metropolis body, using two holes from a non-used inner chainguide. There wasn't much room to work with, but everything ended up fitting perfectly. I replaced the provided nylon roller with a Shimano derailleur pulley:


So everything was installed, and working. But I found the that the power was coming on too quickly for my front drive setup, and I was getting some wheel spin. So I went about trying to figure out how to program this thing. Britt Jackson of SMEV provided credentials to access their support site, http://www.beamtssample.com/, where I was able to download the Windows based sensor setup program. But I had no idea how to connect the sensor to the PC.
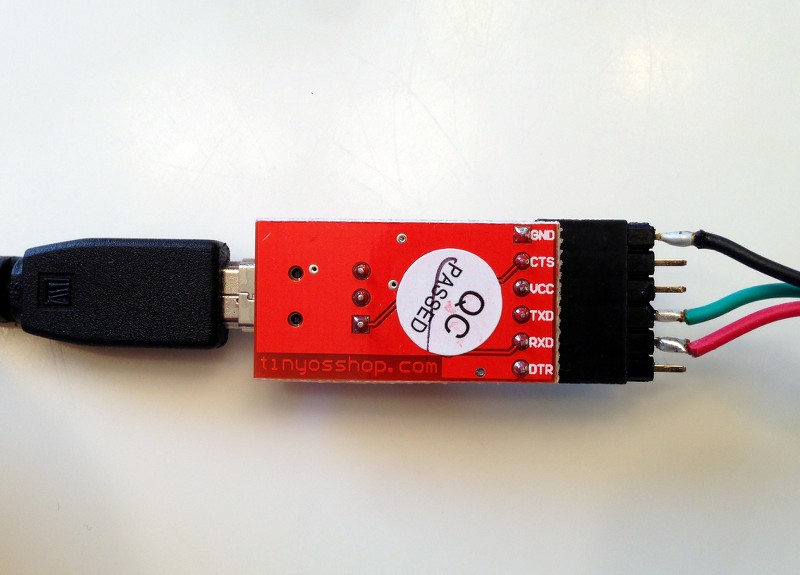
After a couple of unanswered requests to purchase a programming cable, I decided to try to put something together myself. I remembered that I had an FTDI serial to USB interface cable, (which I'd purchased with my Juicebox EVSE). I downloaded the FTDI drivers, fashioned a cable, and found out which one of the 3-pin connector wires was ground. The other two wires had to be Tx/Rx, so it was just a matter of plugging and playing...

Once in the setup program, I set the ramp-up delay to maximum (to eliminate the wheelspin), and set the minimum and maximum output levels to match the input levels of my controller. Here are my settings:

If anyone want to go down this path with one of these torque sensors, here are a few references to help:
Prodecotech Installation Video: https://www.youtube.com/watch?v=dhTecotFNc8
Programming Instructions: http://www.king-meter.com/upload/files/BEAMts GUI 3.rar
FTDI Programming Cable: http://www.emotorwerks.com/products...cable-for-arduino-juicebox/related_product-44
It's going to take me a few days to get a good impression of the sensor, how it works by itself, and how it overlays on my existing PAS system. I'll be back in a while to provide feedback.
http://endless-sphere.com/forums/viewtopic.php?f=6&t=58335
But I've been itching to try a true torque sensor, to overcome a couple of small shortcomings of the PAS. Namely,
- Takeoffs can take a half pedal rotation before the assist kicks in. The bike is heavy, so this typically requires downshifting at stops.
- The speed for the PAS is largely determined by the 5 assist levels. There's not much response based on the pedal speed.
- When I want to punch it, I either have to step though the PAS levels, or I am limited to the +200W or so that my legs can contribute.
My options for a torque sensor are limited. I can't use a BB sensor, because I have a Patterson Metropolis Transmission two-speed crankset. So when I came across the BEAMts sensor from Santa Monica Electric Vehicles, I was eager to give it a try. Unfortunately, they're not so available, and it took me about 6 months to track one down (thanks to a reference by member green79): http://www.usaebikes.com/shop/beamts-pedal-assist-torque-sensor
This is the Prodecotech version, which is wired to plug and play with their bikes. It comes with a bottom bracket mount. So the wiring and the mount would have to be adapted for my bike.
One of the nice features of this torque sensor is the way that it does not require a Cycle Analyst to interpret the signal. Instead, it outputs a throttle level signal, which can be fed directly into any controller. The Prodecotech version of the BEAMts has a pass though connector, which allows you to plug in your throttle. (This was nice for me, because I use the throttle voltage to trigger a relay which controls my lights.)
It took me a while to figure out the wiring. There are three connectors:
- 4-Pin Male Connector - To Controller
- Red: +5V
- Blue: Ground
- Green: Signal
- Yellow: Pass through from battery (used to power battery-level LEDs on Prodeco bike)
- 4-Pin Female Connector - From Throttle
- White: +5V
- Gray: Ground
- Pink: Signal
- Yellow: Passthrough from battery
- 3-Pin Male - Programming Port
- Brown: Ground
- Blue: Tx
- Yellow: Rx
I had to change the gender, and convert the 4-pin to 3-pin connectors. Then it plugged right into my controller...And worked!
The mount had to be adapted to work with the Metropolis Transmission. My solution was to cut the bracket, and mount it to the back of the Metropolis body, using two holes from a non-used inner chainguide. There wasn't much room to work with, but everything ended up fitting perfectly. I replaced the provided nylon roller with a Shimano derailleur pulley:
So everything was installed, and working. But I found the that the power was coming on too quickly for my front drive setup, and I was getting some wheel spin. So I went about trying to figure out how to program this thing. Britt Jackson of SMEV provided credentials to access their support site, http://www.beamtssample.com/, where I was able to download the Windows based sensor setup program. But I had no idea how to connect the sensor to the PC.
After a couple of unanswered requests to purchase a programming cable, I decided to try to put something together myself. I remembered that I had an FTDI serial to USB interface cable, (which I'd purchased with my Juicebox EVSE). I downloaded the FTDI drivers, fashioned a cable, and found out which one of the 3-pin connector wires was ground. The other two wires had to be Tx/Rx, so it was just a matter of plugging and playing...
Once in the setup program, I set the ramp-up delay to maximum (to eliminate the wheelspin), and set the minimum and maximum output levels to match the input levels of my controller. Here are my settings:
If anyone want to go down this path with one of these torque sensors, here are a few references to help:
Prodecotech Installation Video: https://www.youtube.com/watch?v=dhTecotFNc8
Programming Instructions: http://www.king-meter.com/upload/files/BEAMts GUI 3.rar
FTDI Programming Cable: http://www.emotorwerks.com/products...cable-for-arduino-juicebox/related_product-44
It's going to take me a few days to get a good impression of the sensor, how it works by itself, and how it overlays on my existing PAS system. I'll be back in a while to provide feedback.


")
