
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Can MAC 8T take 2000W+?
- Thread starter brucejun
- Start date
E-HP said:neptronix said:Flat ground on high voltage will tell you a lot more about continuous power handling.
The problem is that the OP has specified the voltage as 52V, so it seems like that's a fixed input as far as the question goes. Then on flat ground, the motor will never pull 2000W unless under acceleration, based on the simulator.
If you want the motor to pull high power other that in acceleration, uphill or headwind you need to have very poor motor efficiency. The bike will only need certain amount of power to maintain specific speed. That`s purely physics. When we apply field weakening we can only use more power through efficiency. Otherwise at constant speed the load stays the same and so does the power usage.
What goes to using simulator. The graph and table labeled as graph describes watts as "motor power". The values presented in "graph table" are output figures that are affected by motor and controller efficiency. Figures described in "electrical" table are the ones experienced by the motor. So these are the "motor will pull" figures. We can alter the controller resistance value to point the efficiency only to the motor. Of course battery internal resistance plays big role too so that can be changed accordingly.
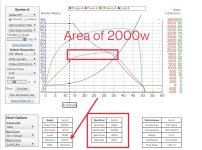
When we have 40A limiting BMS in use we can have situation where on flat ground during acceleration the motor pulls 2000w or more starting from 12.2 mph up to just below (like 0.2 mph) the topspeed (36.3 mph). The max power (~2200w) area are is quite broad from ~14mph to just under 35mph.
Situation at 12mph where motor pulls just under 100 phase amps at ~20V (2000w) or with poor efficiency of 68.5%. Motor converts this 2001w to output power of 1371W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
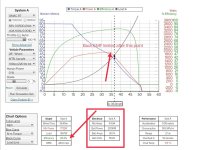
Situation at 36mph where motor pulls just under 44 phase amps against back emf voltage (2000w) the efficiency is now 86.3%. Motor converts this 2006w to output power of 1732W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
TuomasK said:Situation at 12mph where motor pulls just under 100 phase amps at ~20V (2000w) or with poor efficiency of 68.5%. Motor converts this 2001w to output power of 1371W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
Situation at 36mph where motor pulls just under 44 phase amps against back emf voltage (2000w) the efficiency is now 86.3%. Motor converts this 2006w to output power of 1732W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
Idea. Instead of including a link to the same graph over and over, you could set the parameters then take a screen shot and post that.
E-HP said:TuomasK said:Situation at 12mph where motor pulls just under 100 phase amps at ~20V (2000w) or with poor efficiency of 68.5%. Motor converts this 2001w to output power of 1371W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
Situation at 36mph where motor pulls just under 44 phase amps against back emf voltage (2000w) the efficiency is now 86.3%. Motor converts this 2006w to output power of 1732W.
https://ebikes.ca/tools/simulator.html?motor=GMAC8T&batt=cust_58_0.050_21&wheel=28i&frame=mountain&mass=100&hp=0&axis=mph&cont=cust_40_100_0.001_V&cont_b=cust_40_100_0.001_V&motor_b=GMAC8T&batt_b=cust_58_0.100_18&wheel_b=28i&frame_b=mountain&mass_b=100&hp_b=0
Idea. Instead of including a link to the same graph over and over, you could set the parameters then take a screen shot and post that.
Ok. Maybe I'll start with screen shots as nobody else bothers.
Attachments
OK, at least I can see what you're doing. The simplifying assumption is that the controller has no losses, so the battery watts equals the motor watts, plus the heating watts (the 2000 battery watts equals the 1300 motor watts, plus 700 heating watts, in the first example). From what I see, this still only represents the power and efficiency when the bike is accelerating, not continuous. So, what is the continuous scenario where the efficiency would be so low? If you are only talking about under acceleration, then how many hard accelerations could you have before the motor melts?TuomasK said:Ok. Maybe I'll start with screen shots as nobody else bothers.

E-HP said:OK, at least I can see what you're doing. The simplifying assumption is that the controller has no losses, so the battery watts equals the motor watts, plus the heating watts (the 2000 battery watts equals the 1300 motor watts, plus 700 heating watts, in the first example). From what I see, this still only represents the power and efficiency when the bike is accelerating, not continuous. So, what is the continuous scenario where the efficiency would be so low? If you are only talking about under acceleration, then how many hard accelerations could you have before the motor melts?TuomasK said:Ok. Maybe I'll start with screen shots as nobody else bothers.
Yes. For this example simplified the scenario little by cutting down the controller resistance so its 99%+ efficient. So "all" losses from the motor itself.
Practically only scenario where constant 2000w can occur is increased load (uphill, headwind etc.). No matter what motor used its the same unless efficiency is poorer. I would say riding wisely the motor would hold ok but also IT would be easy to burn it

Similar threads
- Replies
- 18
- Views
- 2,042
- Replies
- 7
- Views
- 1,897
- Replies
- 50
- Views
- 5,395
- Replies
- 8
- Views
- 2,240