
If it did, then as soon as the wheel started moving, it'd be moving the magnets, which would continue to trigger the motor, so the motor would never stop, and would continue to go faster and faster as the magnets went faster, telling the sensor you wanted to go faster, so it would respond by spinning the magnets faster, which would tell the sensor to go faster, and so on.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Optimal Hub Motor design? Break down of BionX D-Series
- Thread starter madin88
- Start date
MexicanElmo
1 mW
- Joined
- Aug 10, 2017
- Messages
- 14
This is a very cool motor.
Madin88, do you know how much of airgap there is between magnets and slots? is it noticeably bigger than on the average DD hub? for sure it was a challeng to design a composite frame to keep all that force bounded.
Madin88, do you know how much of airgap there is between magnets and slots? is it noticeably bigger than on the average DD hub? for sure it was a challeng to design a composite frame to keep all that force bounded.
an update about the Powervelocity controller:
It is the same thing as it was with Adaptto.
The no-load numbers (watts and rpm) are in the right ballpark, but under load it performs like shit. It is overheating in no time, like running at 50% peak eta or less. The take off punch isn't that bad (there is a good kick), but than it feels like a 500W motor.
I also tried the sensorless mode of the PV controller by simply unplug the hall connector. It works, but looses sync quick, and at take off it stutters.
That makes me think:
- Are my expectations to high, and i am abusing it too much (only 2,3kg stator mass)?
- is this motor not designd to work with normal 3-phase bldc controllers, or is it because of the hall sensors (or theire position)
As the sensors are placed exactly with a 120° twist from one to the other, it should refer to 120°, but i would need some expert knowledge here..
One reason could be that high currents interrupt the signals, as the no-load numbers always had been ok.
The other reason could be the location of the halls. They are reverse mounted, and much smaller package size than commonly used SS41.
I already have unlaced the motor and will change the Halls for SS413A right now. Than i will hook it up again to PV and Adaptto and see what happens, so more to come later today!
If it still performs like shit i will put it aside and stop the project.
It is only silent up to a given RPM. Than it's starting to become awefully loud. If you ever have heard a Cromotor or other 23pole motors spinning with field weakening to much higer rpm, this is the same noise.
Roughly when it's getting above 300-400Hz switching frequency it will appear. This is no-load.
Under load it is a bit more silent at such high RPM's - at least thats what i found out so far with the short test runs..
Nice that you rode such D-motor bike. I have already spent plenty of time with that motor, but never rode one unit how it comes :lol:
:lol:
one guy from the german pedelec forum has measured the input power. It was 1000W continuous and about 1400W peak.
Really not bad for the fact that it is DD, laced into a large wheel and with internal controller.
link: https://www.pedelecforum.de/forum/index.php?threads/bionx-d-serie.27404/page-130#post-736751
It is the same thing as it was with Adaptto.
The no-load numbers (watts and rpm) are in the right ballpark, but under load it performs like shit. It is overheating in no time, like running at 50% peak eta or less. The take off punch isn't that bad (there is a good kick), but than it feels like a 500W motor.
I also tried the sensorless mode of the PV controller by simply unplug the hall connector. It works, but looses sync quick, and at take off it stutters.
That makes me think:
- Are my expectations to high, and i am abusing it too much (only 2,3kg stator mass)?
- is this motor not designd to work with normal 3-phase bldc controllers, or is it because of the hall sensors (or theire position)
As the sensors are placed exactly with a 120° twist from one to the other, it should refer to 120°, but i would need some expert knowledge here..
One reason could be that high currents interrupt the signals, as the no-load numbers always had been ok.
The other reason could be the location of the halls. They are reverse mounted, and much smaller package size than commonly used SS41.
I already have unlaced the motor and will change the Halls for SS413A right now. Than i will hook it up again to PV and Adaptto and see what happens, so more to come later today!
If it still performs like shit i will put it aside and stop the project.
spinningmagnets said:Also, the D-series is super quiet. Years ago, it was the first hubmotor that really grabbed my attention with how quietly it runs. I investigated further, and that's when I first heard the term "sine wave" controller. Of course we now have many more options when it comes to choosing a sine wave controller, compared to just a few years ago...
It is only silent up to a given RPM. Than it's starting to become awefully loud. If you ever have heard a Cromotor or other 23pole motors spinning with field weakening to much higer rpm, this is the same noise.
Roughly when it's getting above 300-400Hz switching frequency it will appear. This is no-load.
Under load it is a bit more silent at such high RPM's - at least thats what i found out so far with the short test runs..
liveforphysics said:It also feels like stock it's at least a 1kW bike, but I didn't have anyway to measure its power in or out during the demo track laps.
Nice that you rode such D-motor bike. I have already spent plenty of time with that motor, but never rode one unit how it comes
one guy from the german pedelec forum has measured the input power. It was 1000W continuous and about 1400W peak.
Really not bad for the fact that it is DD, laced into a large wheel and with internal controller.
link: https://www.pedelecforum.de/forum/index.php?threads/bionx-d-serie.27404/page-130#post-736751
tecnologic
1 W
- Joined
- Mar 24, 2015
- Messages
- 54
moin,
have u considered saturation of the stator back iron? leading to more sailiency under load. I do not know ur used controllers but on most of them u can set the angular offset of the halls. Just try some angle where the no load speed is incressed by e.g. 15%. So u are literaly in field weakening. But the voltage advance will be eaten up by the current angle backing up in higher load conditions.
regards
Tec
have u considered saturation of the stator back iron? leading to more sailiency under load. I do not know ur used controllers but on most of them u can set the angular offset of the halls. Just try some angle where the no load speed is incressed by e.g. 15%. So u are literaly in field weakening. But the voltage advance will be eaten up by the current angle backing up in higher load conditions.
regards
Tec
MexicanElmo
1 mW
- Joined
- Aug 10, 2017
- Messages
- 14
Hello,
did you get this one second hand on an ebay auction, having a faulty controller? If so, do you have the faulty controller right? is there any way you could diagnose that faulty controller, I mean is there any sign of a short, a burnt device or anything?
Around the web I have come across some really nice comments about BIONX kits, that and your in deep review of hardware design makes me think that this a really well engineered product, not prone to just break down on having the controller overheated, which makes me think that there may be something wrong with the motor wiring itself.
Having a BLDC motor running on sensorless mode pretty much discards the misplaced halls hypothesis, the controller just looks for zero cross BEMF but if it still shows an odd behavior I think that there must be something wrong with windings.
What I would do is to look at the BEMF waveform with an oscilloscope, trying to spin the wheel by hand at a constant rate, then if waveform does not look that sine during the whole revolution... then we may look for shorted strands or wrong patterns.
I know, oscilloscopes are not cheap, but maybe you could borrow one from someone or buy a USB based and look at the waveforms on a PC.
did you get this one second hand on an ebay auction, having a faulty controller? If so, do you have the faulty controller right? is there any way you could diagnose that faulty controller, I mean is there any sign of a short, a burnt device or anything?
Around the web I have come across some really nice comments about BIONX kits, that and your in deep review of hardware design makes me think that this a really well engineered product, not prone to just break down on having the controller overheated, which makes me think that there may be something wrong with the motor wiring itself.
I also tried the sensorless mode of the PV controller by simply unplug the hall connector. It works, but looses sync quick, and at take off it stutters.
Having a BLDC motor running on sensorless mode pretty much discards the misplaced halls hypothesis, the controller just looks for zero cross BEMF but if it still shows an odd behavior I think that there must be something wrong with windings.
What I would do is to look at the BEMF waveform with an oscilloscope, trying to spin the wheel by hand at a constant rate, then if waveform does not look that sine during the whole revolution... then we may look for shorted strands or wrong patterns.
I know, oscilloscopes are not cheap, but maybe you could borrow one from someone or buy a USB based and look at the waveforms on a PC.
MexicanElmo said:I also tried the sensorless mode of the PV controller by simply unplug the hall connector. It works, but looses sync quick, and at take off it stutters.
Having a BLDC motor running on sensorless mode pretty much discards the misplaced halls hypothesis, the controller just looks for zero cross BEMF but if it still shows an odd behavior I think that there must be something wrong with windings.
That's not strictly true, as a number of sensorless ebike controllers would struggle with the eRPM of a 44 pole pair motor like this, especially in the smaller wheel diameter in which it is laced. So it could be that this particular controller isn't well adapted to self starting this hub (stuttery take-off) and keeping up with the commutation frequency at speed (loosing sync).
I'd agree though that overall evidence seems to point to suspect winding damage. If Madin88 doesn't have a scope, then he can also easily see if there are winding shorts using the original equipment he had for characterizing the motor, by comparing all three phase-to-phase or phase-to-neutral inductance values and resistance values, they should be close to identical to each other. You also want to check that there is perfect isolation between the windings and the stator core and hall leads.
Hello everybody ")
I bought 2 d500 motors probably broken few months ago. they were laced in 29 rims.
I have opened them, removed internal controller, wired with external controller and they work like charm. it is a lot of work to make it work but results are worth it. there is no other DD motor below 4kg with such power as far as I know.
my experiences are similar to Yours. motor opening must be done very careful not to break plastic case. I used sharp knife and small hammer. place a knife between plastic sides at place where bolt goes and use a hammer. Do not go more than 5 mm deep. then make full circle and you should be able to separate both sides.
I spend lot of time to make it work sensor less, but it worked only at no load. at load it was loosing sunc even at low speed.
also had a problem with noise when using square wave controller. controller for this motor should be sinewave, with hall sensors.
this is a cheap controller that works perfectly.
https://www.aliexpress.com/item/48-60V-72v-500w-sinewave-controller-BLDC-MOTOR-CONTROLLER-12mosfet-for-electric-scooter-ebike-MTB-TRICYCLE/32796667053.html?spm=a2g0s.9042311.0.0.dc6hJM
there are few German threads about d500 noise. with sine-wave controller noise is almost absent, but sometimes plastic covers resonates even with no motor engaged. My solution is to add a drop of hot melt glue at every spoke intersection between spokes and plastic cover.
I was running this motor at 1.6KW (52V and 35A) but it heated going uphill. with 25A controller it can go all day long (with 29 wheel and 100kg rider ). in 29 wheel it will go 47km/h on flat (52km/h if you bend a bit). drag is also very low, around 11w at 25 kph (1kw Chinese hub can have 20W drag).
Best regards,
Dusan Latinovic
I bought 2 d500 motors probably broken few months ago. they were laced in 29 rims.
I have opened them, removed internal controller, wired with external controller and they work like charm. it is a lot of work to make it work but results are worth it. there is no other DD motor below 4kg with such power as far as I know.
my experiences are similar to Yours. motor opening must be done very careful not to break plastic case. I used sharp knife and small hammer. place a knife between plastic sides at place where bolt goes and use a hammer. Do not go more than 5 mm deep. then make full circle and you should be able to separate both sides.
I spend lot of time to make it work sensor less, but it worked only at no load. at load it was loosing sunc even at low speed.
also had a problem with noise when using square wave controller. controller for this motor should be sinewave, with hall sensors.
this is a cheap controller that works perfectly.
https://www.aliexpress.com/item/48-60V-72v-500w-sinewave-controller-BLDC-MOTOR-CONTROLLER-12mosfet-for-electric-scooter-ebike-MTB-TRICYCLE/32796667053.html?spm=a2g0s.9042311.0.0.dc6hJM
there are few German threads about d500 noise. with sine-wave controller noise is almost absent, but sometimes plastic covers resonates even with no motor engaged. My solution is to add a drop of hot melt glue at every spoke intersection between spokes and plastic cover.
I was running this motor at 1.6KW (52V and 35A) but it heated going uphill. with 25A controller it can go all day long (with 29 wheel and 100kg rider
). in 29 wheel it will go 47km/h on flat (52km/h if you bend a bit). drag is also very low, around 11w at 25 kph (1kw Chinese hub can have 20W drag).Best regards,
Dusan Latinovic
MexicanElmo said:Hello,
did you get this one second hand on an ebay auction, having a faulty controller? If so, do you have the faulty controller right? is there any way you could diagnose that faulty controller, I mean is there any sign of a short, a burnt device or anything?
Around the web I have come across some really nice comments about BIONX kits, that and your in deep review of hardware design makes me think that this a really well engineered product, not prone to just break down on having the controller overheated, which makes me think that there may be something wrong with the motor wiring itself.
Yes, the motor i bought on ebay auction. It was sold as "defective".
I do not have the controller anymore, but i could not spot any signs of burnt FET's or other parts.. btw: it is a 12FET controller.
Bionx have had huge issues with one or more versions of the battery electronic board a few years ago. You will find plenty of such boards in german ebay.
Also the motor controllers fail sometimes. Becuase of those issues many dealers in my area have discontinued to offer BionX, so the D-series unit is very very rare to see..
The motor itself is made really well in my opinion. All parts seem to be well engineerd with high quality materials.
justin_le said:I'd agree though that overall evidence seems to point to suspect winding damage. If Madin88 doesn't have a scope, then he can also easily see if there are winding shorts using the original equipment he had for characterizing the motor, by comparing all three phase-to-phase or phase-to-neutral inductance values and resistance values, they should be close to identical to each other. You also want to check that there is perfect isolation between the windings and the stator core and hall leads.
I compared all three values of the resistance and inductance and they where within less than 1%.
I also measured for shorts between windings and stator and it was fine too, however, measuring with an insulation tester at 500 or 1000V DC would be more precisely.
MexicanElmo said:This is a very cool motor.
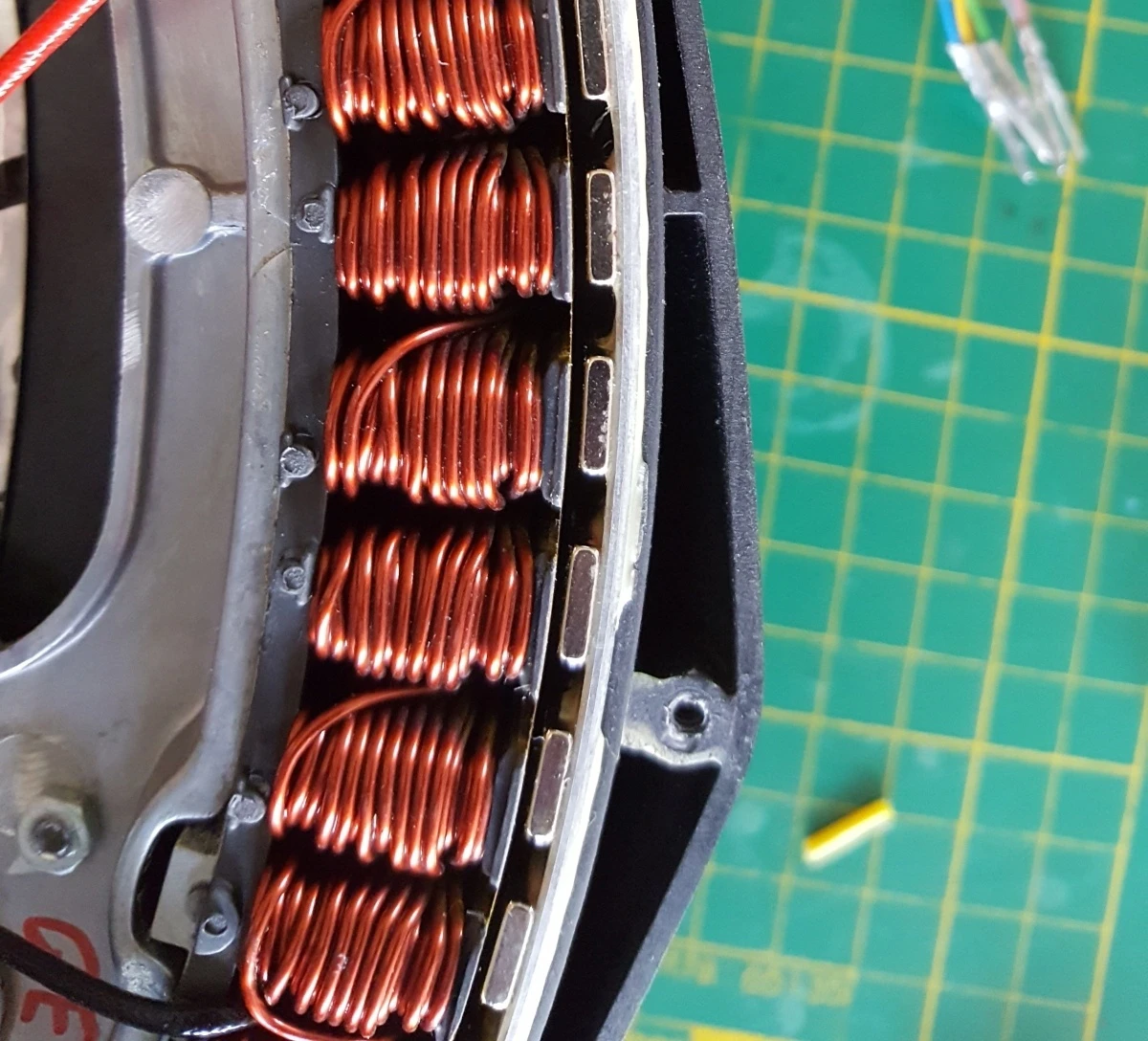
Madin88, do you know how much of airgap there is between magnets and slots? is it noticeably bigger than on the average DD hub? for sure it was a challeng to design a composite frame to keep all that force bounded.
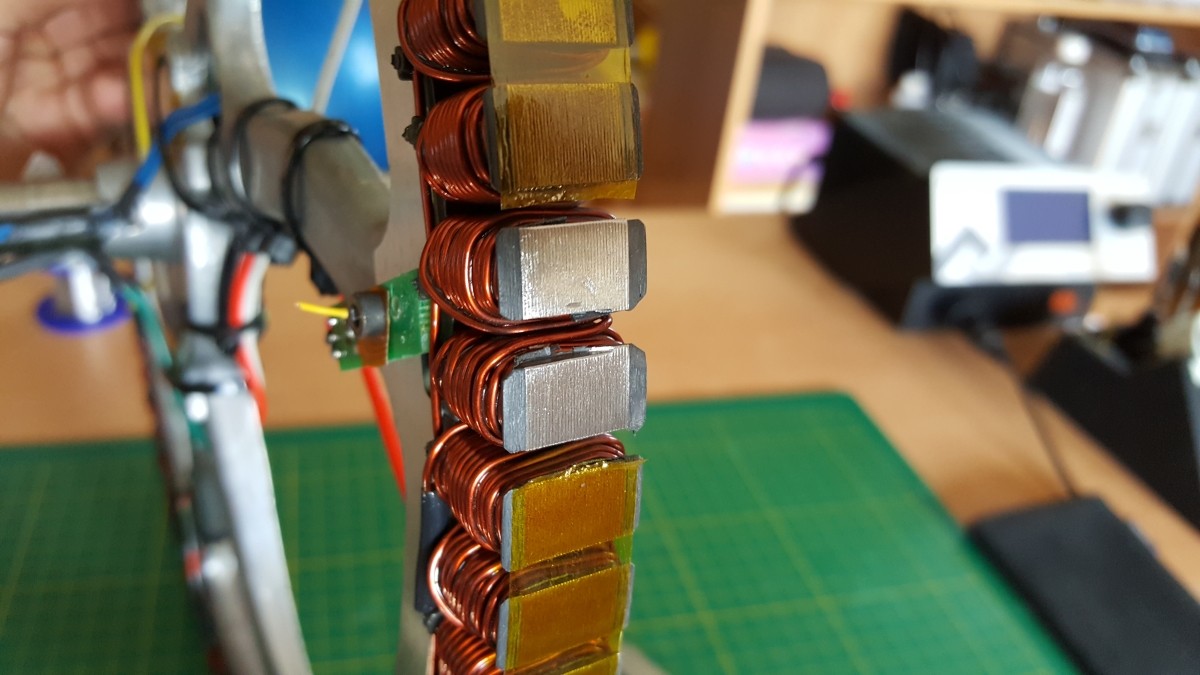
i shoot a pic of the air gap. the magnets are 2mm thick and the back iron is 1,6mm.
I would say it is about 1mm +- 0,1mm. It isn't easy to measure that gap with only one sidecover holding the rotor (it varies more than).

Allex
100 MW
Are SS413A better than SS411A in some way?
Well, how was the result?
First thing i noticed when following the "find the right hall and phase wire combo chart" was the motor stuck, what it did NOT DO before.
Before it was vibrating, but never stuck like usually hubmotors do when going through that procedure and the combo is wrong.
OK, so something MUST have changed in terms of signals or response characteristics.
When i removed the halls for grinding and brushing the stator surface, i broke one of the foils with conduction path from the small board to the sensor.
I than repaird that connection by soldering wires to the sensor. It could be that this wasn't optimal because one or more of the three wires where now located much closer to the windings which could have distorted the signal quality.
This tells us if a LED blinks on a cheap "multifunctional motor testing device", it doesn't mean that much..
Now to the test run:
I was making a 50km long bike tour with other e-bikers so i could test many conditions.
First i noticed that it really cannot take much abuse in terms of phase current. It overheats still very quick when pumping more than 50-60A, so i set up the PV controller for 30A batt and 50A phase for the tour.
This was about 2500W of input power at an average battery voltage of 85V.
When going full throttle on the flat, the temperature did stop to climb after acceleration at an input power of about 2000W continuously at a speed of about 65kmh.
So it can do more than 2000W at high RPM which isn't bad for a 4kg DD motor pushing 125kg (45kg vetor bike + myself).
When climbing hills at 15kmh with the other ebikers, i was able to go up very long 12% grades (about 350 meter height in total without stop at 5km distance), BUT that was at only 500-800W of input power with the setting of 50A phase current. I needed to control the throttle very carefully, because even two seconds with too much throttle already led instantly to 10°C more stator temperature. The response of the thermistor on the windings is very quick. On hills or during harder acceleration it follows the twist of the throttle.
I don't know how accurate the PV controller controls the phase amps, but if it is not far off, than the 50A are absolutely the limit for this motor in terms if you want to use it longer than 20seconds before it overheats. The stator + axle has less than 2,3kg of mass so there is almost no heat sponge for more phase amps.
One ebiker was riding the eZee powerd bike i built last year so we did accerlation tests, watched the temperature and such things.
That bike had 27,5" wheels (more than 30% larger as the wheel of my D-motor).
The input power was limited to 1600W and topspeed was about 45kmh (it is 6T motor).
When accelerating side by side, the eZee with it's 1600W of input power was accelerating exactly as quick as the D-motor bike with 2500W of input power (total weight bike + rider also was similar in this case). After 30-35kmh the D-motor was better in acceleration.
The eZee did not go above 60°C while the D-motor was often hitting the 100-110°C.
This shows up that even a very optimized 4kg DD motor cannot keep up in terms of torque when compared with 4kg geared motors like the eZee.
But at higher RPM's, or above 30kmh in my case it really comes to life.
It can take 2000W easy in this condition with stable temps.
What i also noticed was the much better handling and suspension characteristics compared to the MXUS 3k in 24" wheel which was installed before on that bike.
With the D-motor it feels simila to a middrive and bumps and the quick stuff get ironed out really well now from the suspension.
the wheel stays on the ground much better, even if it is much smaller.
Aside from the lower weight, the centered spokes may also help in terms of handling and comfort.
What i plan to do is a test for saturation as i think this happens quite early on this motor.
Guys, do you think it is accurate enough to let the bike push against a vertical placed bathroom scale and going up with phase current in steps? I would let the windings cool down each step.
First thing i noticed when following the "find the right hall and phase wire combo chart" was the motor stuck, what it did NOT DO before.
Before it was vibrating, but never stuck like usually hubmotors do when going through that procedure and the combo is wrong.
OK, so something MUST have changed in terms of signals or response characteristics.
When i removed the halls for grinding and brushing the stator surface, i broke one of the foils with conduction path from the small board to the sensor.
I than repaird that connection by soldering wires to the sensor. It could be that this wasn't optimal because one or more of the three wires where now located much closer to the windings which could have distorted the signal quality.
This tells us if a LED blinks on a cheap "multifunctional motor testing device", it doesn't mean that much..
Now to the test run:
I was making a 50km long bike tour with other e-bikers so i could test many conditions.
First i noticed that it really cannot take much abuse in terms of phase current. It overheats still very quick when pumping more than 50-60A, so i set up the PV controller for 30A batt and 50A phase for the tour.
This was about 2500W of input power at an average battery voltage of 85V.
When going full throttle on the flat, the temperature did stop to climb after acceleration at an input power of about 2000W continuously at a speed of about 65kmh.
So it can do more than 2000W at high RPM which isn't bad for a 4kg DD motor pushing 125kg (45kg vetor bike + myself).
When climbing hills at 15kmh with the other ebikers, i was able to go up very long 12% grades (about 350 meter height in total without stop at 5km distance), BUT that was at only 500-800W of input power with the setting of 50A phase current. I needed to control the throttle very carefully, because even two seconds with too much throttle already led instantly to 10°C more stator temperature. The response of the thermistor on the windings is very quick. On hills or during harder acceleration it follows the twist of the throttle.
I don't know how accurate the PV controller controls the phase amps, but if it is not far off, than the 50A are absolutely the limit for this motor in terms if you want to use it longer than 20seconds before it overheats. The stator + axle has less than 2,3kg of mass so there is almost no heat sponge for more phase amps.
One ebiker was riding the eZee powerd bike i built last year so we did accerlation tests, watched the temperature and such things.
That bike had 27,5" wheels (more than 30% larger as the wheel of my D-motor).
The input power was limited to 1600W and topspeed was about 45kmh (it is 6T motor).
When accelerating side by side, the eZee with it's 1600W of input power was accelerating exactly as quick as the D-motor bike with 2500W of input power (total weight bike + rider also was similar in this case). After 30-35kmh the D-motor was better in acceleration.
The eZee did not go above 60°C while the D-motor was often hitting the 100-110°C.
This shows up that even a very optimized 4kg DD motor cannot keep up in terms of torque when compared with 4kg geared motors like the eZee.
But at higher RPM's, or above 30kmh in my case it really comes to life.
It can take 2000W easy in this condition with stable temps.
What i also noticed was the much better handling and suspension characteristics compared to the MXUS 3k in 24" wheel which was installed before on that bike.
With the D-motor it feels simila to a middrive and bumps and the quick stuff get ironed out really well now from the suspension.
the wheel stays on the ground much better, even if it is much smaller.
Aside from the lower weight, the centered spokes may also help in terms of handling and comfort.
What i plan to do is a test for saturation as i think this happens quite early on this motor.
Guys, do you think it is accurate enough to let the bike push against a vertical placed bathroom scale and going up with phase current in steps? I would let the windings cool down each step.
Dulel said:there are few German threads about d500 noise. with sine-wave controller noise is almost absent, but sometimes plastic covers resonates even with no motor engaged. My solution is to add a drop of hot melt glue at every spoke intersection between spokes and plastic cover.
I was running this motor at 1.6KW (52V and 35A) but it heated going uphill. with 25A controller it can go all day long (with 29 wheel and 100kg rider
thanks for your input, and welcome to the forum!
This shows my experience. That lightweight motor is really sensitive to phase amps as it doesn't have much heat sponge.
It certainly also makes a differnce if you run 48V with 25A controller compared to the 85V / 30A like i did. It will top out much earlier in your case, while on my setup a lot more power is pushed into the motor if i am not carefully with the throttle.
The thing with the glue between spokes and sidecover is new to me, but it makes lots of sense
Will try it out and see if the ugly noise disappers. Thanks.
The only difference is the gauss sensitivity.Allex said:Are SS413A better than SS411A in some way?
The 413A needs about twice the magnetic flux to make it swith compared to the 411A.
When i was nearing with a magnet it was switching already at 3cm or more distance between magnet and sensor so i think the 411A would not make anything better.
tecnologic
1 W
- Joined
- Mar 24, 2015
- Messages
- 54
madin88 said:What i plan to do is a test for saturation as i think this happens quite early on this motor.
Guys, do you think it is accurate enough to let the bike push against a vertical placed bathroom scale and going up with phase current in steps? I would let the windings cool down each step.
to get an idea at which phase amps torque is dropping this should work. From reading your experiences i would say with 50A u are well in saturation.
Furthermore the saturation limit might differ from standstill to no load rpm.
tecnologic said:From reading your experiences i would say with 50A u are well in saturation.
Furthermore the saturation limit might differ from standstill to no load rpm.
Do you really think it will be WELL in saturation at only 50A?
BionX rates the d-motor for 25/50Nm which would mean 26/52 A phase current (kT is 0.955), and about 75/300W of copper losses.
What i like is the performance at higher RPM. It can do above 65kmh on the flat without any cooling mods (WOT, 85V batt, sinewave controller without FOC or field weakening)
The consumption than is between 2000-2500W (around 30Nm of torque are needed with my wheel size calculated by Justins simulator).
It pedals MUCH easier compared to the MXUS, but thats no wonder compared to the smaller air gap surface..
What i don't like is the AWEFUL noise it makes, and that it won't turn into a torque monster when increasing the current.
tecnologic
1 W
- Joined
- Mar 24, 2015
- Messages
- 54
madin88 said:Do you really think it will be WELL in saturation at only 50A?
BionX rates the d-motor for 25/50Nm which would mean 26/52 A phase current (kT is 0.955), and about 75/300W of copper losses.
Thats good data. According to the ratio of 26 to 52 for twice the torque. Means the iron should not saturate at 52A, cause kt is not droping. So all seems to be related to self heating. At this point only better cooling will help.
Can u create a spectrum of the noise with your phone. There are several quite good sound Spectrum analyser apps out there. With the pwm frequency and the actual rpm know, may be we can analyse the cause of the noise. If its Mechanics or electronics.
Or analyse by ear. Does the noise frequency change with speed. Or only the amplitude? Is it more like a white noise or some decent frequency?
No, the amps are calculated from kT, not measured or confirmed!tecnologic said:Thats good data. According to the ratio of 26 to 52 for twice the torque. Means the iron should not saturate at 52A, cause kt is not droping. So all seems to be related to self heating. At this point only better cooling will help.
As the motor is rated for 25/50Nm, it would be crappy if kT is already dropping here, but who knows??
yes the noise changes with speed and it is not controller related. I shoot a vid:Or analyse by ear. Does the noise frequency change with speed. Or only the amplitude? Is it more like a white noise or some decent frequency?
https://drive.google.com/open?id=0B04UmzhTSmRcMjdfQmRWYV8yb2M
turn down the volume lool
now the glue gun is already hot. a vid for comparison will follow :wink:
ETIT:
the "glue mod" did help nothing. the noise stayed the same.
Could it be that it comes rather from the stator? It could be transferred over the axle to the swingarm of the bike..
btw: in the vid the motor was spinning at about 720RPM (78V battery), or 66kmh.
tecnologic
1 W
- Joined
- Mar 24, 2015
- Messages
- 54
Do u have the same noise when u speed up the wheel without controller? Uses ur actual controller sine or block mode to power the motor. Does the motor have high cogging torque?
tecnologic said:Do u have the same noise when u speed up the wheel without controller? Uses ur actual controller sine or block mode to power the motor. Does the motor have high cogging torque?
Sine. The noise was the same with the Adaptto controller, and it is exactly the same with or without throttle (when it runs on).
I cannot spin it by hand to 700RPM (without any connection to the controller), but there should be no difference.
Yes it has cogging, but the drag is very low.
As some owners say the D motor is dead silent, and some say not, it would make sense that it has something to do with the swingarm which works like an amplifier for the noise.
question to the experts:
whats the effect of the airgap to kT?
The gap here is 1mm which is about twice as large compared to other hub motors
I thought about swapping the magnets for thicker ones to make the gap smaller, but i don't know how much sense in would make..
macribs
10 MW
- Joined
- Jul 22, 2014
- Messages
- 3,702
Could be your swing arm is amplifying the noise, working much like a tuning fork?
I seem to remember someone one this board drilled the swing arm and filled it with some sort of noise cancellation gunk (stevio maybe?). Think it was that spray on isolation used in housing walls? You could also try to fill the swing arm with that spray on gunk used for car hifi. Very good for sound dampening and deadening. Two holes and just empty a can or two into the swing arm.
I seem to remember someone one this board drilled the swing arm and filled it with some sort of noise cancellation gunk (stevio maybe?). Think it was that spray on isolation used in housing walls? You could also try to fill the swing arm with that spray on gunk used for car hifi. Very good for sound dampening and deadening. Two holes and just empty a can or two into the swing arm.
macribs said:Could be your swing arm is amplifying the noise, working much like a tuning fork?
Yes thats most certainly the reason, and on the bench (axle clamped with a vice) it was not present.
The axle and stator spider is very weight optimized so those parts are probably prone to flex and vibrations when the magnets are passing the coils.
I seem to remember someone one this board drilled the swing arm and filled it with some sort of noise cancellation gunk (stevio maybe?
I think it was also merlin who put such stuff into the swingarm of his raptor frame^^
The vector frame i only used for testing the D-motor, but maybe i try it out.
Want back the power of the QS205, but i know that i will miss the awesome handling of that lightweight BionX
Justin had this motor on the dyno and did som tests with ferrofluid.
here the link to the pdf file: https://endless-sphere.com/forums/viewtopic.php?f=3&t=93078#p1361795
I wonder if he did tests about saturation or measurements of the torque, because my motor / controller combo had quite low peak torque.
This is probably caused by the wide air gap of about 1mm.
And if his motor does also have this ugly noise above a certain RPM.
Next thing will be, if i have time, swapping the magnets for larger and stronger ones.
The stator has a width of 12mm while the mags only have 11,5 so this could be improved, and i think they could be 0,5mm thicker without rubbing on the stator.
here the link to the pdf file: https://endless-sphere.com/forums/viewtopic.php?f=3&t=93078#p1361795
I wonder if he did tests about saturation or measurements of the torque, because my motor / controller combo had quite low peak torque.
This is probably caused by the wide air gap of about 1mm.
And if his motor does also have this ugly noise above a certain RPM.
Next thing will be, if i have time, swapping the magnets for larger and stronger ones.
The stator has a width of 12mm while the mags only have 11,5 so this could be improved, and i think they could be 0,5mm thicker without rubbing on the stator.
madin88 said:I wonder if he did tests about saturation or measurements of the torque, because my motor / controller combo had quite low peak torque.
Unfortunately not, that requires a very different kind of test apparatus and setup than my current dyno system. Here is how the motor performed at 36V with a 20A nominal controller (actual current limit of 19A)

It's pretty much spot on.
Here is the no load cogging torque on this motor from a few discrete measurement points. There was something a bit funky going on around 330 rpm which you can see in the data and why I took smaller steps there:

It's decent but not exceptionally low like the BionX PL350, ~0.65-0.75 Nm at typical to fast cruising speeds.
What is really interesting is the same drag torque tests after the 16mL of Statorade was added. The actual fill was less though since some had been leaking from cracks the motor from my disassembly process. Notice how the drag is almost totally flat and independent of speed below 300 rpm, at ~1.1 Nm. Then at higher speeds the drag reduces and by 400 RPM it's down to 0.9 Nm, very close to the motor without statorade (~0.85 Nm at 400 rpm)

Many thanks for your work.
nice "feature" of this motor
I asked a magnet manufactory about an offer for stronger magnets just as info:
Grade: N45H (stock: unknown)
Size: 12x7.5x2.3mm (stock 11,5 x 7,6 x2mm)
Magnetization direction: Through thickness
Coating: Ni
Tolerance: ±0.05mm
FOB Shengzheng unit price: $35 for 100pcs
The price is not bad, but aside from higher torque i think such conversion would turn this motor also into a "drag monster".
Should i leave it as it is, or would it be worth the effort?
justin_le said:Notice how the drag is almost totally flat and independent of speed below 300 rpm, at ~1.1 Nm. Then at higher speeds the drag reduces and by 400 RPM it's down to 0.9 Nm, very close to the motor without statorade (~0.85 Nm at 400 rpm)
BionX_D_Statorade_Drag.jpg
nice "feature" of this motor
I asked a magnet manufactory about an offer for stronger magnets just as info:
Grade: N45H (stock: unknown)
Size: 12x7.5x2.3mm (stock 11,5 x 7,6 x2mm)
Magnetization direction: Through thickness
Coating: Ni
Tolerance: ±0.05mm
FOB Shengzheng unit price: $35 for 100pcs
The price is not bad, but aside from higher torque i think such conversion would turn this motor also into a "drag monster".
Should i leave it as it is, or would it be worth the effort?
lizardmech
10 W
- Joined
- May 19, 2017
- Messages
- 67
Wonder if perhaps this motor is too difficult for the more common ebike controllers to drive at high ERPM? Maybe something like a VESC or lebowski controller would have a better chance due to more advanced FOC and motor detection.
lizardmech said:Wonder if perhaps this motor is too difficult for the more common ebike controllers to drive at high ERPM? Maybe something like a VESC or lebowski controller would have a better chance due to more advanced FOC and motor detection.
The power and eta (heating of the motor) was not bad at high speed, so i don't think this is the case.
And the ERPM are not that high
The real problem is the max torque it can produce, and the noise. Probably the torque is a bit controller related, but otherwise those are more a mechanical or construction problem.
Similar threads
- Replies
- 9
- Views
- 4,613
- Replies
- 28
- Views
- 12,007
- Replies
- 23
- Views
- 9,748