
I want to make a simple arduino based measurement of the phase current flowing to the motor but have some theoretical question. I am looking into this diagram of currents in the 3 phase bldc motor:
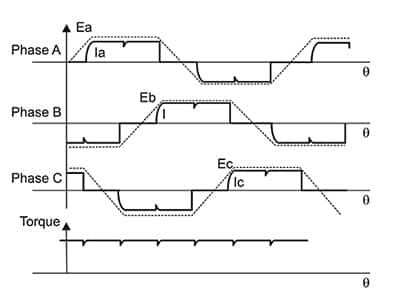
This shows that the so called "phase current" always flows over two phases either forward or backward. Since it's a sinewave controller the instantaneous current will go up and down in both directions. So if I take some hall effect current sensor and put in in phase B for example, measure the current over some period of 0.5 sec and calculate RMS from these values I will get the so called "phase current" as used by the bike simulator of Grin, right? Or 'm not correct?
I know that in the high end controllers there are 3 phase current probes but it's used for foc control and I just have to know how much torque is producing by the motor, nothing more.
This shows that the so called "phase current" always flows over two phases either forward or backward. Since it's a sinewave controller the instantaneous current will go up and down in both directions. So if I take some hall effect current sensor and put in in phase B for example, measure the current over some period of 0.5 sec and calculate RMS from these values I will get the so called "phase current" as used by the bike simulator of Grin, right? Or 'm not correct?
I know that in the high end controllers there are 3 phase current probes but it's used for foc control and I just have to know how much torque is producing by the motor, nothing more.
