Been meaning to post this for a while, so here's a pic dump with commentary..
More info on the motor here, but to summarize quickly, it's rated for 3kw on 48v, peaks at about 92% efficiency, and has roughly a 70kv.
http://www.endless-sphere.com/forums/viewtopic.php?f=31&t=44058

15mm shaft..

Keyway is the usual 3/16ths.

outer diameter is 138mm.

10AWG phase wires - awesome!

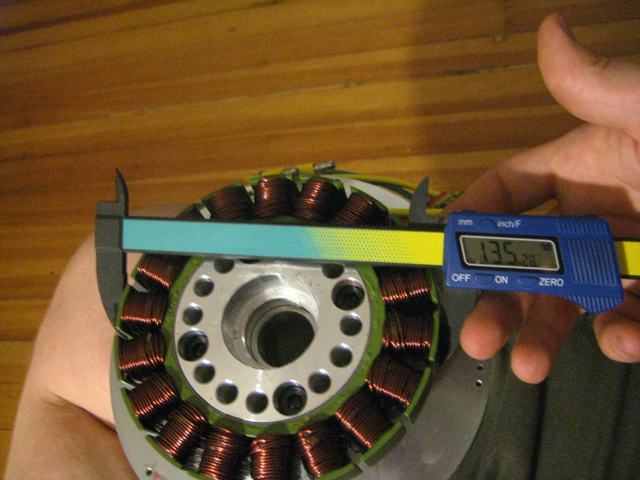
I believe this is 127mm the other way..

inner shaft is about 17mm.

A look inside after popping the back case off.

Nice intake design")

The magnet assembly is an interesting design. Laminations should be 0.5mm.

magnet assy. is 33.5mm thick.

and 75.5mm wide

One magnet is a bit out of place..

Here's the interior look at the stator. The windings are very tight and precise all around.

Another look.

33.19mm thick.

Total diameter of stator would be 116mm.
Edit: 'roller' says it is 133.35mm (5.25"); i suppose this includes the iron? ring around the stator.

Lam count and view.

Lower cover is almost 1lb.

Magnet assy + fan + shaft = almost 3lb.

Top cover is almost 1lb.

stator + outer case is a little over 6lb.

entire motor comes in at almost 11lbs, but not quite.
I thought the motor was going to be larger, but it's more like an overgrown RC motor with halls, a low pole count ( any controller that can push a MAC / BMC hub motor, which has 16 poles, should have no problem pushing this motor, which has less. ), and a very robust looking cooling solution.
Edit: thought i'd add this in here.. might be important...
Hall / phase wire info from drewjet is as follows:
Phases:
A - Black
B - Green
C - Yellow
Halls:
grd - black
+5v - red
a - green
b - yellow
c - brown
temp - blu
I will test this tomorrow to ensure that it is proper.
More info on the motor here, but to summarize quickly, it's rated for 3kw on 48v, peaks at about 92% efficiency, and has roughly a 70kv.
http://www.endless-sphere.com/forums/viewtopic.php?f=31&t=44058
15mm shaft..
Keyway is the usual 3/16ths.
outer diameter is 138mm.
10AWG phase wires - awesome!
I believe this is 127mm the other way..
inner shaft is about 17mm.
A look inside after popping the back case off.
Nice intake design
The magnet assembly is an interesting design. Laminations should be 0.5mm.
magnet assy. is 33.5mm thick.
and 75.5mm wide
One magnet is a bit out of place..
Here's the interior look at the stator. The windings are very tight and precise all around.
Another look.
33.19mm thick.
Total diameter of stator would be 116mm.
Edit: 'roller' says it is 133.35mm (5.25"); i suppose this includes the iron? ring around the stator.
Lam count and view.
Lower cover is almost 1lb.
Magnet assy + fan + shaft = almost 3lb.
Top cover is almost 1lb.
stator + outer case is a little over 6lb.
entire motor comes in at almost 11lbs, but not quite.
I thought the motor was going to be larger, but it's more like an overgrown RC motor with halls, a low pole count ( any controller that can push a MAC / BMC hub motor, which has 16 poles, should have no problem pushing this motor, which has less. ), and a very robust looking cooling solution.
Edit: thought i'd add this in here.. might be important...
Hall / phase wire info from drewjet is as follows:
Phases:
A - Black
B - Green
C - Yellow
Halls:
grd - black
+5v - red
a - green
b - yellow
c - brown
temp - blu
I will test this tomorrow to ensure that it is proper.