
eee291
100 kW
They also have the option on AliExpress now.
https://www.aliexpress.com/item/1005003835665401.html
https://www.aliexpress.com/item/1005003835665401.html
owhite said:Be advised people that I have an encoder version of the QS165 and I'm getting line noise in the connection between my motor and the encoder. ...This is mostly showing up when I put an oscilloscope on the lines going to the encoder to track down the source of the noise. Right now the noise on the lines are so bad the controller is not able to get correct counts from the motor -- so no joy on running it in sensor mode.
owhite said:This is also good news because VESC controllers work with these encoders.
SlowCo said:owhite said:This is also good news because VESC controllers work with these encoders.
Great that you were able to solve the noise issue.
And if VESC controllers work with the encoder on this motor then the new Flipsky 75200 could be a nice match: https://flipsky.net/collections/ele...for-e-foil-fighting-robot-surfboard-agv-robot
owhite said:owhite said:Be advised people that I have an encoder version of the QS165 and I'm getting line noise in the connection between my motor and the encoder. ...This is mostly showing up when I put an oscilloscope on the lines going to the encoder to track down the source of the noise. Right now the noise on the lines are so bad the controller is not able to get correct counts from the motor -- so no joy on running it in sensor mode.
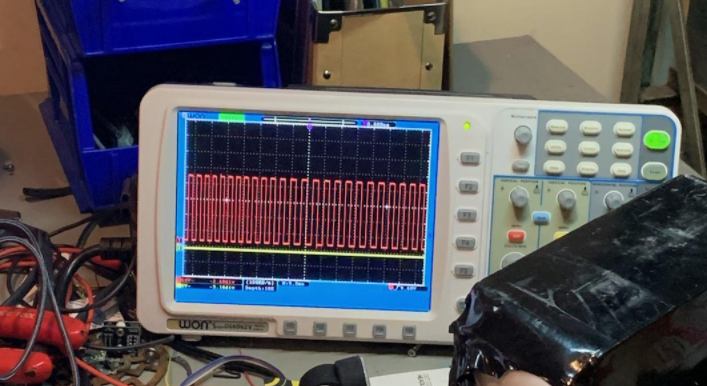
To find the source I powered up the encoder with GND and 5V, and the put an oscilloscope on one of the encoder outputs. If you turn the motor by hand, the line looks like what you see here:
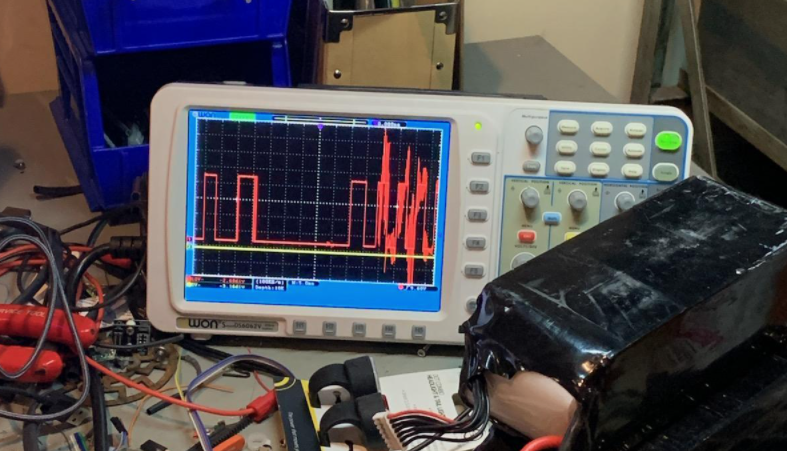
However, when I put the motor on two different VESC-based controllers the signals were a mess:
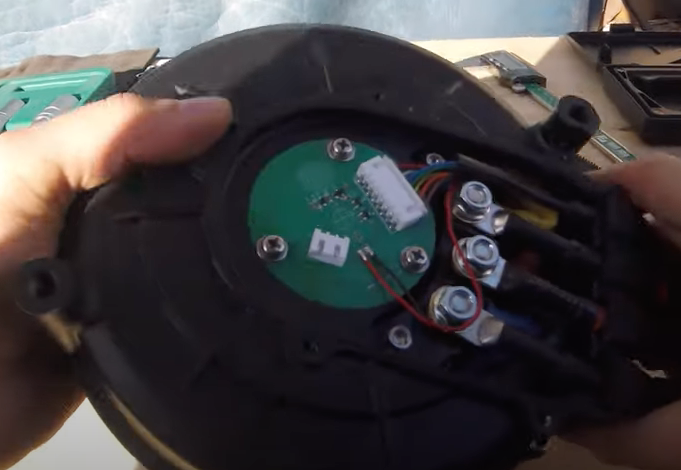
This was easily corrected, and I wouldnt be surprised if this was just a problem with my motor. What I discovered is that there was some kind of strange electrical connection between the motor chassis and the encoder. Here's a picture of the PCB holding the encoder:
The noise stopped when I loosened the three screws and pulled the pcb away from the motor, and surprisingly the line noise did not return when I mounted the PCB back on the QS. There's some kind of adhesive that's used to hold the PCB in place -- maybe that's conducting electrical noise. No idea, but it's fixed now.
This is also good news because VESC controllers work with these encoders.
magudaman said:Really appreciate you doing this testing. I have my QS165 and a Flipsky 75200 coming hopefully next week. I will report what happens with mine, really hoping I don’t have similar issues.
Turns out the noise in the line of my QS165 was coming from the motor itself. It was obvious something was wrong because when I was hooking the QS up to a VESC, the readings for encoder output in VESC-tool were a mess.
magudaman said:Well crap, I guess I could always run it sensorless. Motor is showing up Monday.

magudaman said:Got all my stuff!...
owhite said:magudaman said:Really appreciate you doing this testing. I have my QS165 and a Flipsky 75200 coming hopefully next week. I will report what happens with mine, really hoping I don’t have similar issues.
Turns out the noise in the line of my QS165 was coming from the motor itself. It was obvious something was wrong because when I was hooking the QS up to a VESC, the readings for encoder output in VESC-tool were a mess.
I would not count on the QS165 encoder working with your controller. I'm still having noise issues which is shown in the video below.
Here are some settings that you definitely should use in vesc-tool:
Motor settings-->general-->general tab:
Motor type: FOC
Invert motor direction: whatever
Sensor port mode: ABI encoder
ABI encoder counts: 4096
Motor settings-->FOC-->general:
Sensor mode: Sensorless
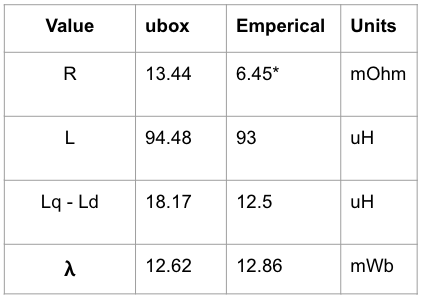
Then, use RL and lambda to get your parameters.
To "calibrate" the encoder
Motor settings-->FOC-->Encoder
There is a little play button to perform encoder detection. The purpose of this is to get Offset and Ratio. Hit the play button, then zip over to:
Data analysis-->Realtime Data-->(Right panel) Rotor position, and make sure you turn on the "RT" button on right to start collecting real time data. Now you should be able to see your VESC collecting data. Are you seeing a lot of spikes? Is the signal stair stepping up or down? If the detection ends go back to
Motor settings-->FOC-->Encoder and take a look at your results. A good sign is if it says your Ratio: 7. See this video for more information.
[youtube]fUQKr0zElaU[/youtube].
And hey, dont panic you may have better luck than I did.
magudaman said:Well good news. Mine seems to detect with no issues so far. I used the parameters you mentioned and ran the encoder detection. Came up with 80.4 offset and ratio of 7. The real time data looks pretty flawless and smooth. Still seems a bit glitchy on startup on the bench but I need to triple check all my settings. I can’t seem to access field weakening on my controller and have a couple other functions I would like to read about some more. But at least I can go ahead and order my frame.
owhite said:I would not count on the QS165 encoder working with your controller. I'm still having noise issues which is shown in the video below.


c.wagner said:Can somebody share his knowledge on how to connect a QS165 encoder to a non-fardriver controller? Iam currently struggling with their pinout definition
QS165 encoder pinout.png
The newest firmware for ASI BAC controllers supports encoder and I have to connect:
- Encoder Sine V source (Sine voltage output from encoder)
- Encoder Cos V source(Cos voltage output from encoder)
- VCC
- Ground
Or is the QS165 not an encoder with sine/cosine wave per mechanical revolution and thus won´t work?
Thanks in advance!
magudaman said:You could always move over to VSEC controller, it is natively supported.
Hi, I juste got an vesc controller and was wooundering if you could help me on how to connect the encoder to the vesc because the name of the pin on the connector of the motor does not match the input on the controller.magudaman said:c.wagner said:Can somebody share his knowledge on how to connect a QS165 encoder to a non-fardriver controller? Iam currently struggling with their pinout definition
QS165 encoder pinout.png
The newest firmware for ASI BAC controllers supports encoder and I have to connect:
- Encoder Sine V source (Sine voltage output from encoder)
- Encoder Cos V source(Cos voltage output from encoder)
- VCC
- Ground
Or is the QS165 not an encoder with sine/cosine wave per mechanical revolution and thus won´t work?
Thanks in advance!
It has an abi incremental encoder not a sin cos encoder. You could always move over to VSEC controller, it is natively supported.
it's new not for mass production yet. Only CNC sample available. Sample order is ready to order. Price is 920 USD/PC for CNC made QS165 motor with gear box.


