zombiess
10 MW
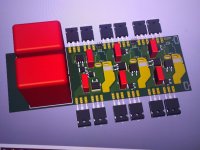
I started talking with Shaman a while ago about power stage design. Talking about this stuff motivated me to design a power stage which has 12 to 24 TO-247/TO-264 MOSFETs / IGBTs to test out some design ideas I thought up. I'm still using the TD350E gate driver chip for now because I know it works really well, is isolated and I've built multiple gate drivers with it into the 300A range. I'm planning to swap to something a bit newer in the near future, but qualifying a new gate driver takes some time. This setup can do about 50kHz max which is more than most motors need. DC link caps are 500V 90uF 26A ripple each, so running low inductance motors should be possible. Screw lugs accept up to 2AWG wire and I put dual feeds on the DC side. If I scale up to 18 or 24 FETs I'll add dual to the output and run 3 on the input, I'd also add more caps. The MOSFET legs are surface mounted to the PCB, so it pretty much eliminates the leg current limits and the PCB helps dissipate the heat from the legs. This also keeps the gate driver components cooler as the only thermal interface is the small PCB holes the legs go through. I can also swap out for TO-220 devices and run a bunch of them in a 24-36FET setup. Current sensors are Allegro 200A units, but I've also included a bypass shunt option which allows me to increase the sensor range from 200A all the way to 400A easily. This saves cost on current sensors.
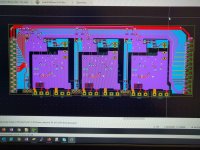
I'm attempting to use a PCB as the DC bus. I've performed many CFD analysis simulations and it looks quite doable with 6 layer PCBs depending on manufacturing cost (it looks doable but I don't have an official quote). I've been bench testing a 6 layer PCB with 2oz top / bottom and 0.5oz inner layers and it will do 40A DC but is limited with the phase output (2.5oz) as the traces are not as wide. I put 40A DC through it and leaving it on for an hour, thermal run away started at ~45A in a 25C room. Production would be 4oz on all layers.
A benefit with the 6 layer PCB is my DC bus can be put on alternating layers which assists in lowering the inductance. I've measured this design at just under 20nH. I've also added an optional clamping RCD snubber which recovers ~50% of the energy it absorbs back into the DC bus, so far it doesn't look like I'll need it. I've been putting ~600A pulses through 2 parallel MOSFETs and turn off overshoot is <10V over bus at 62V, this will probably drop even more >100V bus. I could also swap in IGBTs and go to higher voltage.
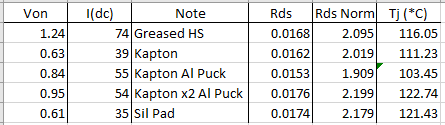
It also has an improved thermal path on the MOSFETs as I've been able to eliminate the insulator directly underneath the MOSFETs. In near ideal conditions a 5mOhm TO-247 can sustain 100A DC at 25C ambient with forced air cooling for 3mins with a case temp < 80C. This means much higher short current bursts can be achieved, probably 180-200A peak per device for at least 10s, just speculating. So far current sharing between devices is looking good and I didn't even RDSon match them as I did in past projects.
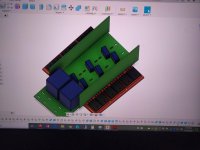
I'm planning on using a 3D printed case with built in duct work for air cooling the PCB and gate drivers.
In order to test the power stage out I needed a controller, so I decided to go the VESC route. I designed up some PCBs similar in design to what Axiom has done. I didn't use a FPGA though, instead I used discrete logic to provide hardware fault detection, indication and shut down. I went a bit overboard, but it was a fun exercise to improve my logic gate skills. It mostly works, just doesn't reset correctly, got a bug somewhere. Has all the same hardware based fault detection, over current per phase, over voltage per phase / DC bus. Just go look at the Axiom schematic to get an idea, then imagine a version of it that is a few notches down to save cost and not worry about automotive certified parts.
I'm about to start the VESC journey, I heard it is an interesting and often frustrating one so that I can hook this up to my dyno and see how it runs under real world load.
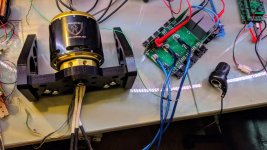
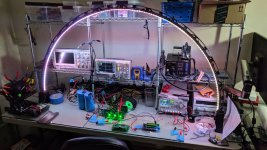
I have more videos and pictures I'll post up later, right now here is one showing the power stage/gate driver. The lower boards (triple stack) are the VESC controller and the thing with the LCD is my double pulse tester.
Short video of me shorting the output to simulate shoot through to see if the MOSFETs would blow up (they never have on this gate driver).
https://youtu.be/bvqAEGtAvEM
Before anyone says something about the PCBs needing support, they have it, it's built into the case which isn't shown here.
If anyone is interested in a power stage like this let me know. When I get bored I like to engineer stuff, now if only I can find people that want to buy it. Designing it is the easy part.
I'm attempting to use a PCB as the DC bus. I've performed many CFD analysis simulations and it looks quite doable with 6 layer PCBs depending on manufacturing cost (it looks doable but I don't have an official quote). I've been bench testing a 6 layer PCB with 2oz top / bottom and 0.5oz inner layers and it will do 40A DC but is limited with the phase output (2.5oz) as the traces are not as wide. I put 40A DC through it and leaving it on for an hour, thermal run away started at ~45A in a 25C room. Production would be 4oz on all layers.
A benefit with the 6 layer PCB is my DC bus can be put on alternating layers which assists in lowering the inductance. I've measured this design at just under 20nH. I've also added an optional clamping RCD snubber which recovers ~50% of the energy it absorbs back into the DC bus, so far it doesn't look like I'll need it. I've been putting ~600A pulses through 2 parallel MOSFETs and turn off overshoot is <10V over bus at 62V, this will probably drop even more >100V bus. I could also swap in IGBTs and go to higher voltage.
It also has an improved thermal path on the MOSFETs as I've been able to eliminate the insulator directly underneath the MOSFETs. In near ideal conditions a 5mOhm TO-247 can sustain 100A DC at 25C ambient with forced air cooling for 3mins with a case temp < 80C. This means much higher short current bursts can be achieved, probably 180-200A peak per device for at least 10s, just speculating. So far current sharing between devices is looking good and I didn't even RDSon match them as I did in past projects.
I'm planning on using a 3D printed case with built in duct work for air cooling the PCB and gate drivers.
In order to test the power stage out I needed a controller, so I decided to go the VESC route. I designed up some PCBs similar in design to what Axiom has done. I didn't use a FPGA though, instead I used discrete logic to provide hardware fault detection, indication and shut down. I went a bit overboard, but it was a fun exercise to improve my logic gate skills. It mostly works, just doesn't reset correctly, got a bug somewhere. Has all the same hardware based fault detection, over current per phase, over voltage per phase / DC bus. Just go look at the Axiom schematic to get an idea, then imagine a version of it that is a few notches down to save cost and not worry about automotive certified parts.
I'm about to start the VESC journey, I heard it is an interesting and often frustrating one so that I can hook this up to my dyno and see how it runs under real world load.
I have more videos and pictures I'll post up later, right now here is one showing the power stage/gate driver. The lower boards (triple stack) are the VESC controller and the thing with the LCD is my double pulse tester.
Short video of me shorting the output to simulate shoot through to see if the MOSFETs would blow up (they never have on this gate driver).
https://youtu.be/bvqAEGtAvEM
Before anyone says something about the PCBs needing support, they have it, it's built into the case which isn't shown here.
If anyone is interested in a power stage like this let me know. When I get bored I like to engineer stuff, now if only I can find people that want to buy it. Designing it is the easy part.
Attachments
-
 Workbench-Pulse-testing.jpg178.5 KB · Views: 5,236
Workbench-Pulse-testing.jpg178.5 KB · Views: 5,236 -
 Workbench.jpg215.1 KB · Views: 5,216
Workbench.jpg215.1 KB · Views: 5,216 -
 Concept1.jpg80.1 KB · Views: 5,224
Concept1.jpg80.1 KB · Views: 5,224 -
 Concept2.jpg109.1 KB · Views: 5,223
Concept2.jpg109.1 KB · Views: 5,223 -
 PCB Gate Drive.jpg150.3 KB · Views: 5,223
PCB Gate Drive.jpg150.3 KB · Views: 5,223 -
 PCB grounds.jpg174.1 KB · Views: 5,214
PCB grounds.jpg174.1 KB · Views: 5,214 -
 Gate Driver.jpg181.4 KB · Views: 5,214
Gate Driver.jpg181.4 KB · Views: 5,214 -
 VESC.jpg212.5 KB · Views: 5,231
VESC.jpg212.5 KB · Views: 5,231 -
 Prototype.jpg276.2 KB · Views: 5,234
Prototype.jpg276.2 KB · Views: 5,234