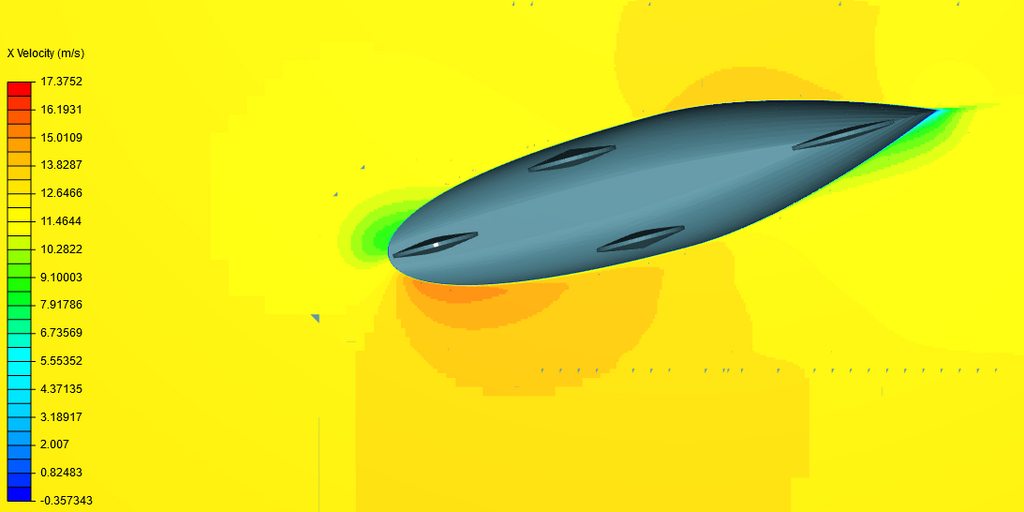
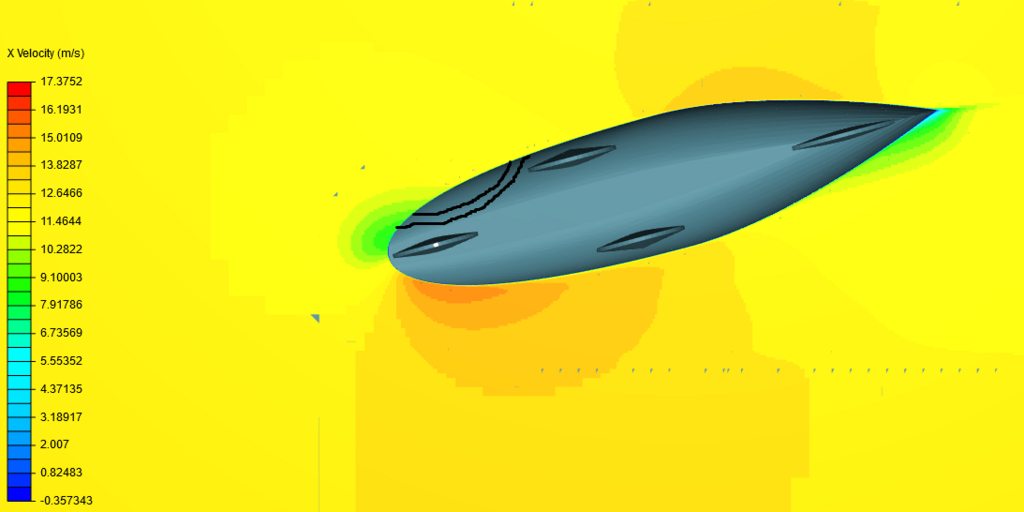
Yea, this is mostly about trying to design a more or less fully faired bike - as in singletrack e-assisted HPV that has efficient fairing AND with stable handling in side winds.
My goal is to design (or at least try to...) a single-track bike that is more or less 'aerodynamically stable' given aerodynamic side forces affecting steering, direction of travel directly (which than affects balance) and balance directly - without causing 'undue' actual steering input to be felt by the rider (which is nasty - I've tried that).
First, pneumatic trail:
https://en.wikipedia.org/wiki/Pneumatic_trail
This is pretty hard stuff, admittedly. I've seen plenty of posts here by people (mostly motorcyclists) that have deep understanding of singletrack mechanics, so maybe someone can offer some thoughts.
First and foremost, there is an implication here: zero 'mechanical trail' is NOT, actually, zero because your 'total trail' is a sum of mechanical and pneumatic trails - as far as, for instance, 'retun to center' trail force is concerned.
There is an other implication however: even if your steering is completely locked, side force 'twists the tire' into an angle (slip angle ) that causes steering away from the side force, which happens automatically even with zero mechanical trail and no steering input whatsoever (like on non-steered wheels)
https://simpletire.com/learn/tire-news-information/pneumatic-trail
Which might be good thing in a turn on a car, but on bike in heavy side winds (and even on cars in this case) things get interesting, because side force impulse acts at your center of pressure and 'tries' not to just topple the bike, but to rotate the bike around it's center of gravity according to lever arm between CP and CG, both on roll axis AND on yaw axis! On a car with CP located above centrally between the wheels the effect is minimal however (unless the wind is extremely strong and there is a ton of side area like on trucks) - there is no (large) change in direction, the car is only 'blown sideways' a bit.
But there is still friction (unless you are riding on ice), so I'm having trouble to properly visualise behaviour of the system - 'twist and relax' behaviour during actual riding is giving me problems... for instance, you don't feel the tires 'dragging across the pavement' when you steer the bike while riding despite contact patch having no-zero size and being offset from steereing axis - which you DO feel when stationary... yet it is possible to overcome this by doing 'skiding the rear wheel' on purpose. And, of course, rear wheel *does* anchor the bike laterally at least somewhat, otherwise riding a conventional bike would be like riding a bike with rear caster or an omniwheel! (Which I didn't try, unfortunately - that would certainly be a very interesting experience)
Seems like designing a fully faired bike is like designing a light aircraft WITH additional (complex and nonlinear) constraints due to inherent 'roll/yaw' couple of singletrack dynamics.
Here is how I see it (let us assume that bike has exactly zero mechanical trail and the rider does not try and correct for anything):
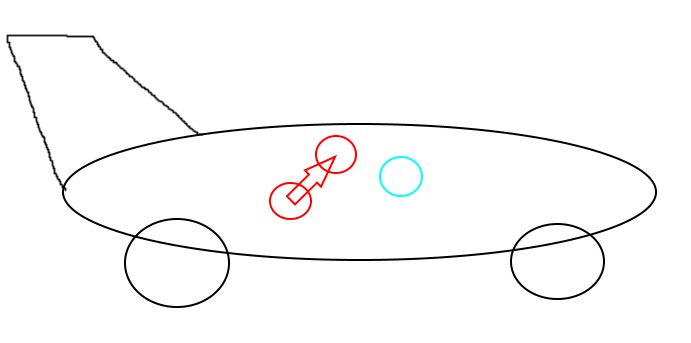
Here is a sketch of a fully-faired bicycle (Center of pressure is blue, center of gravity is red):
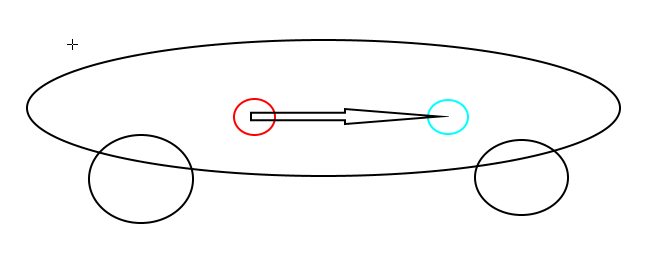
Let's assume they are on the same height, but there is a considerable lever arm betwen CG and CP, therefore side wind will cause the bike mostly to *yaw* away from direction from the wind due to side force at contact patches causes 'self-steer', which in turn will cause centrifugal force toppling the bike *into* the wind - which is likely a good thing I guess? Or maybe not?
But there certainly can be 'too much of a good thing', if bonnnewille racing streamliners are of any indication!
https://en.wikipedia.org/wiki/BUB_Seven_Streamliner
https://www.youtube.com/watch?v=Knubr97HVss
Look at the length of their 'tails' behind rear wheel! Look at this wheelbase! That certainly shifts CP way further to the back and somewhere closer to the center of wheelbase.
(While HPV racing streamliners with short tails and short wheelbase are notorious unstable in windy conditions)
Let's add huge-arse vertical stabiliser:
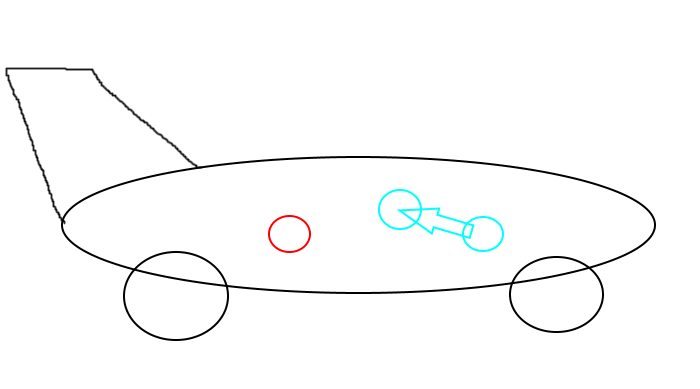
So, CP is shifted back and up now, which imply that 'direction change' is now less, is more likely NOT to overcompensate wind toppling. Maybe. Really hard to ascertain without doing a lot of experiments.
Alternatively (which is easier on e-bike due to compact, but heavy battery) you can move 'ballast' around, play with body position of the rider (which is heaviest piece of 'ballast' on e-bike) to bring CG closer to CP both vertically and longitudinally.
All in all, if you want fairings on your bike, you want a combination of front and rear fairings not just for aerodynamics, but actual handling reasons - 'dustbin fairings' were banned for a reason, and while you want lateral area as small as possible, having it 'unbalanced' is worse.
My goal is to design (or at least try to...) a single-track bike that is more or less 'aerodynamically stable' given aerodynamic side forces affecting steering, direction of travel directly (which than affects balance) and balance directly - without causing 'undue' actual steering input to be felt by the rider (which is nasty - I've tried that).
First, pneumatic trail:
https://en.wikipedia.org/wiki/Pneumatic_trail
This is pretty hard stuff, admittedly. I've seen plenty of posts here by people (mostly motorcyclists) that have deep understanding of singletrack mechanics, so maybe someone can offer some thoughts.
First and foremost, there is an implication here: zero 'mechanical trail' is NOT, actually, zero because your 'total trail' is a sum of mechanical and pneumatic trails - as far as, for instance, 'retun to center' trail force is concerned.
There is an other implication however: even if your steering is completely locked, side force 'twists the tire' into an angle (slip angle ) that causes steering away from the side force, which happens automatically even with zero mechanical trail and no steering input whatsoever (like on non-steered wheels)
https://simpletire.com/learn/tire-news-information/pneumatic-trail
Which might be good thing in a turn on a car, but on bike in heavy side winds (and even on cars in this case) things get interesting, because side force impulse acts at your center of pressure and 'tries' not to just topple the bike, but to rotate the bike around it's center of gravity according to lever arm between CP and CG, both on roll axis AND on yaw axis! On a car with CP located above centrally between the wheels the effect is minimal however (unless the wind is extremely strong and there is a ton of side area like on trucks) - there is no (large) change in direction, the car is only 'blown sideways' a bit.
But there is still friction (unless you are riding on ice), so I'm having trouble to properly visualise behaviour of the system - 'twist and relax' behaviour during actual riding is giving me problems... for instance, you don't feel the tires 'dragging across the pavement' when you steer the bike while riding despite contact patch having no-zero size and being offset from steereing axis - which you DO feel when stationary... yet it is possible to overcome this by doing 'skiding the rear wheel' on purpose. And, of course, rear wheel *does* anchor the bike laterally at least somewhat, otherwise riding a conventional bike would be like riding a bike with rear caster or an omniwheel! (Which I didn't try, unfortunately - that would certainly be a very interesting experience)
Seems like designing a fully faired bike is like designing a light aircraft WITH additional (complex and nonlinear) constraints due to inherent 'roll/yaw' couple of singletrack dynamics.
Here is how I see it (let us assume that bike has exactly zero mechanical trail and the rider does not try and correct for anything):
Here is a sketch of a fully-faired bicycle (Center of pressure is blue, center of gravity is red):
Let's assume they are on the same height, but there is a considerable lever arm betwen CG and CP, therefore side wind will cause the bike mostly to *yaw* away from direction from the wind due to side force at contact patches causes 'self-steer', which in turn will cause centrifugal force toppling the bike *into* the wind - which is likely a good thing I guess? Or maybe not?
But there certainly can be 'too much of a good thing', if bonnnewille racing streamliners are of any indication!
https://en.wikipedia.org/wiki/BUB_Seven_Streamliner
https://www.youtube.com/watch?v=Knubr97HVss
Look at the length of their 'tails' behind rear wheel! Look at this wheelbase! That certainly shifts CP way further to the back and somewhere closer to the center of wheelbase.
(While HPV racing streamliners with short tails and short wheelbase are notorious unstable in windy conditions)
Let's add huge-arse vertical stabiliser:
So, CP is shifted back and up now, which imply that 'direction change' is now less, is more likely NOT to overcompensate wind toppling. Maybe. Really hard to ascertain without doing a lot of experiments.
Alternatively (which is easier on e-bike due to compact, but heavy battery) you can move 'ballast' around, play with body position of the rider (which is heaviest piece of 'ballast' on e-bike) to bring CG closer to CP both vertically and longitudinally.
All in all, if you want fairings on your bike, you want a combination of front and rear fairings not just for aerodynamics, but actual handling reasons - 'dustbin fairings' were banned for a reason, and while you want lateral area as small as possible, having it 'unbalanced' is worse.
")