Fixed the axle (though the whole process took almost all day instead of the couple hours I had planned), installed the supplied thermistor while I was in there, disconnecting the KTY sensor:
https://endless-sphere.com/forums/viewtopic.php?f=2&t=67833&p=1402291#p1402291
Test rides...some wierd stuff.
First, I tried riding around more with the second firmware from yesterday; didn't really do much testing beyond a simple ride up and down the street yesterday so thought I should push it more today.
There are so many bangs and stutters even just riding down the street at a steady speed (anything from 10 to 20MPH), that I had to go back to the ofirst firmware from yesterday; I was kind of afraid it was going to break something even with the reinforcement.

I did try various MF settings, RPM limits, phase currents, etc., with basically no change in behavior (sometimes in intensity; like going down in MF value made them worse, going up mostly made them better).
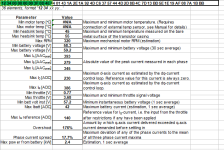
However, I couldn't seem to get valid logs. I either kept getting stats with all zeroes except the 1234, or I'd get the stuff like a post or two above where it would start with F00F as if it were the realtime stats. Once I got an almost valid set, but min batt v inst is way way high. This problem continued for all the onground testing I did today. Examples:
12 34 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
12 34 13 E2 3B A0 37 31 42 31 02 8B 19 A4 1A 75 56 0B 53 90 58 AD BA 9C 58 E8 14 31 5F D1 FE C0 1F C8 33 B7
F0 0F F0 0F 03 4C 16 72 00 F5 03 D9 1D AE 0B 8F 05 AA 16 F3 14 1E 1B BA 75 D9 01 5E 05 90 27 A4 02 5A 00 03 18 AD 17 D0 17 61 17 2A 00 33 79 28 05 93 FC 43 3B 71 CF AA 2C E4 E7 1A 17 1F 01 7B 00 06 00 00 F0 0F

I did get mostly valid stats for some offground tests.
12 34 13 E2 3B A0 37 31 42 31 02 8B 19 A4 1A 75 56 0B 53 90 58 AD BA 9C 58 E8 14 31 5F D1 FE C0 1F C8 33 B7
When I went back to the first firmware from yseterday, SFOC5ambwAug09
Code:
Initiating write...
Searching for bl . . . . . . . . . . . .
Found dsPIC30F4011 fw ver. 4.0.3
Waiting for the boot loader to be ready...ok
Parsing hexfile...
File timestamp: 8/9/2018 11:34:46 AM
Opening hexfile...ok
Validating hexfile...ok
Hex file successfully parsed
Writing flash....ok
Tx 20.2kB / Rx 207 bytes / 15.9s
Write successfully completed
I left the RPM down at 350, since I don't need it anywhere near the 600+ max it can go to. I think I'm going to bring it down lower, as a test, to see how it behaves as it hits that limit (it didn't appear to do anything when I hit almost 25MPH on one test, so I"m curious now).
But after a short set of test runs up and down the street, not even 3/4 of a mile, when I pulled into the yard to stop and get the stats, the controller acted strange. First I powered it off, shutting down the trike, then I setup realterm to receive the stats, and plugged in the serial cable. NO response at all, not even the usual power-on Status LED sequence, etc. So I disconnected and reconnected, and nothing. I shut down everything on the computer, and rebooted it, and unplugged/plugged the USB-serial in case it might be that, with no change. Even powered on the trike with serial not connected to see if it would oeprate, but no go.
After messing around with stuff for a few minutes, I rolled the trike on it's side so I could check for disconnections or whatever underneath, and found the controller so hot I couldn't keep the palm of my hand on it very long (almost 10 seconds), and couldn't put the back of my hand against it at all. The motor was very warm but not yet hot, but it was getting hotter. I didn't have access to the infrared thermometer today, or I"d give the readouts.
I was hot myself, and tired, and kinda frustrated with the day so far, almost all of it spent out in the heat (even though in the shade, still near or at 100F since late morning-ish). Since I wanted to go in and type all this stuff up, and eat something, but I also wanted to get the ride stats to put in here, and didn't have the patience to wait for everything to cool down on it's own. That could take quite a while. So I got some ice out of the deepfreeze and used that to cool the controller and motor casings down to where I could keep touching them.
Once I did this, which took about 10 minutes (about 11 minutes longer than I wanted it to), I could now get stats, but they are all zeros again. :/
12 34 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
View attachment 2
ca stats for the ride:
57.6vstart
57.1vrest
57.0vmin
117.5amax
0amax
24.7mph max
Did an offground test again and got valid stats, so it's "working", just not normal.
12 34 21 94 42 55 21 BB 26 FB 02 88 1A 23 1A 3B 0D 6D 0B A1 0C 8C 05 4B 0D 1D 14 9E 5E 35 15 E0 09 55 32 3C
View attachment 3
Once I can handle getting up again and going out there, I'm going to cut all the other hall wires from the motor to the grinfineon, so the *only* wires from the motor will run to the SFOC, and nothing can interfere with them, because I ahve a suspicion that there is some kind of leaakge current or noise or whatever from the 5v in the grinfineon thru the halls into the SFOC via the thermistor, and it's messing with the SFOC somehow.
Since the issue with zeroed stats has happened consistently (under load at least) today and only today, and that's after I did the sensor wiring, there logically should be some connection between them.
I can also cut the sensor wires from the SFOC to the sensor, and see if that's it, too, if the first doesn't work.
I have to go back to the older stats and see, but I have this feeling that the controller didn't used to get so hot so fast as it has the last few days, even when the air temperature is as high or higher. Can't compare the motor since I didn't really check it until that night with the IR thermometer.
I can lower the phase currents, since I might be hitting saturation in the motor, and then it's just making heat with the excess.

") Reminds me of an old Beetle that would sometimes crawl some meter on its own when parked, depending on weather.
Reminds me of an old Beetle that would sometimes crawl some meter on its own when parked, depending on weather.