Jellyfish0
100 µW
- Joined
- Dec 19, 2022
- Messages
- 8
correction
I meant to say both motors would have the same mm² of copper> same amount of copper. NOT SURFACE AREA
Assuming two motors have the same overall surface area of
copper strands and turns, but motor A one has 15 strands while motor B has 25 strands
will there be any meaningful difference between them?
I only read about a theoretical skin effect difference
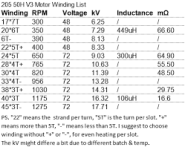
Example to two motors with identical surface area:
I meant to say both motors would have the same mm² of copper> same amount of copper. NOT SURFACE AREA
Assuming two motors have the same overall surface area of
copper strands and turns, but motor A one has 15 strands while motor B has 25 strands
will there be any meaningful difference between them?
I only read about a theoretical skin effect difference
Example to two motors with identical surface area:
Motor A: 10 strands> each 1mm²
Motor B: 10 strands>each 0.5mm² also
Same amount of turns for both