fixvid said:
I have the new bike, its Cannondale Habit Carbon 2 SE. Currently has 13kg but i will put it on a weight loss diet until it reaches 12kg. Maximum weight without batteries should not exceed 15kg because i have to put it on a roof rack and i'm not the strongest.
We have 3kg to play with for the motor, bracket, transmission, pedal freewheel and controller. Battery will be removable and im thinking of using 10s2p configuration with 21700 5000mAh cells capable of delivering 15A.
Steepest gradient which it should climb is 25% at low speed around 3-4mph. I have 63 kg so i'm fairly light and won't need a ton of power to climb a steep mountain. My other bike with Shimano E8000 mid drive can climb anything with a little effort and it has a 3 stage gear reduction around 25:1 - 20:1.
My ideea is using a small RC motor like Turnigy D5035 or D6374 or this cheap chinese outrunner:
https://www.aliexpress.com/item/33011400738.html?spm=a2g0o.detail.1000014.23.4c7d6d4bO5mMcK&gps-id=pcDetailBottomMoreOtherSeller&scm=1007.13338.128125.0&scm_id=1007.13338.128125.0&scm-url=1007.13338.128125.0&pvid=ab9d1249-6d2e-4171-bdc2-6c7b14c5d059
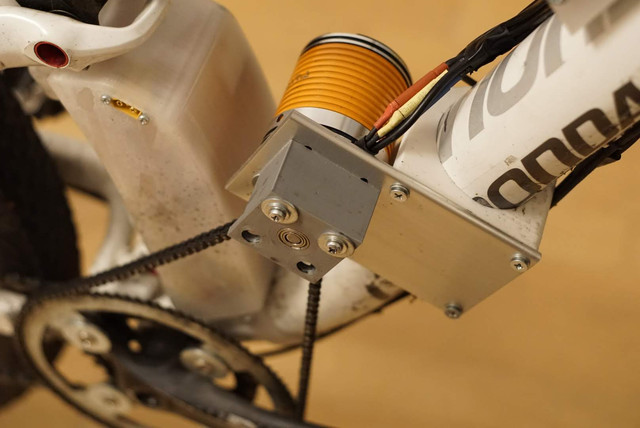
Primary reduction will use htd5 belt with 20t drive pulley and im thinking of printing the 80t driven pulley .. I would save 25bucks and will be easier to integrate a one way bearing into the big pulley:
https://www.aliexpress.com/item/32833380128.html?spm=a2g0s.8937460.0.0.32722e0eHUgWd4
Is the 20t pulley big enough to prevent any slippage (15mm belt)?
Secondary reduction will be driven by a 12mm jackshaft and 15t 25h sprocket to reduce the vibration of really small sprockets. Driven sprocket will be 90t and i'm planning to convert to ISIS bb with trial cranks + freewheel and adapter for 104bcd chainrings or 76bcd because i have eagle and those chainrings come with 76bcd hole spacing.
Total reduction: 24:1 with around 700W - 1000w available. I think this drive will surpass the Shimano one which is pretty good benchmark.
Just for fun, I went here to take a quick look at power requirements.
http://www.u.arizona.edu/~sandiway/bike/climb.html
That says you would need about 360 watts. However, I believe that is average power for a climb, and assumes perfectly graded and compacted dirt. I also believe that is watts applied to the tire contact patch, and does not account for efficiency. I would want 2-3X that amount. So your 700-1000 Watts is probably a good estimate.
At a guess, this should be do-able in your 3 KG.
If I was going to build a 2 stage, I would take a look at a gearbox with 5-7x reduction in one stage. Possibly using a 60-80T plastic spur and 12 T Pinion. I would plan on spending some time calculating tooth loading, and discussing technical issues with gear suppliers. Then I would take a look at #35 Go-Kart chain or a similar size for the second stage. Probably a 12-15 T on the gearbox, mounted to a freewheel or sprag clutch, and a 60T on the crank (same dia as my 90T #25 chainring). This would require proper analysis of the gears, and some machining.
If I wanted to do something much simpler, I would do a first stage using #25 chain, 12T and 60T, for 5x reduction. Second stage #35 chain as above. And a bit of steam punk look with the extra sprocket.
When I tried a belt drive on my build, I found it to be far less forgiving than the chain, in addition to being bulkier, and handling less power in a given space. But they are quiet and sexy...
Since this sounds like a really interesting build, I would suggest starting a dedicated thread for it, so it gets the attention it deserves. Throw up a link here, and I will follow.