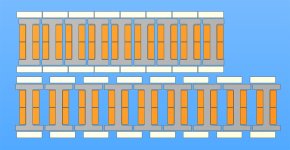
Ok, I'll do the 1/6 and 5/6 sections.rhitee05 said:When you get a chance, is it possible to also get a linearized section at the inner and outer radii as well? I think I can so some interpolation between the different sections to try and estimate the effects of the wedge vs. square cross sections. It won't be as accurate as a full-3D solver, but should get at least some estimate of the effects. Actually, the best thing for this would be linearized sections at 1/6 and 5/6 distance from inner-to-outer radius. That will give me center cuts for each third of the radius.
My naive reasoning was that, with a uniform inner core section and maximised end areas, square magnets (non wedge) would mean that no lamination of the inner core would be at greater risk of saturation than any other. The amount of steel in the ends of the cores is obviously a compromise for structural reasons.
I'm interested to play with the volume ratios of copper to iron in the main part of the core.

")