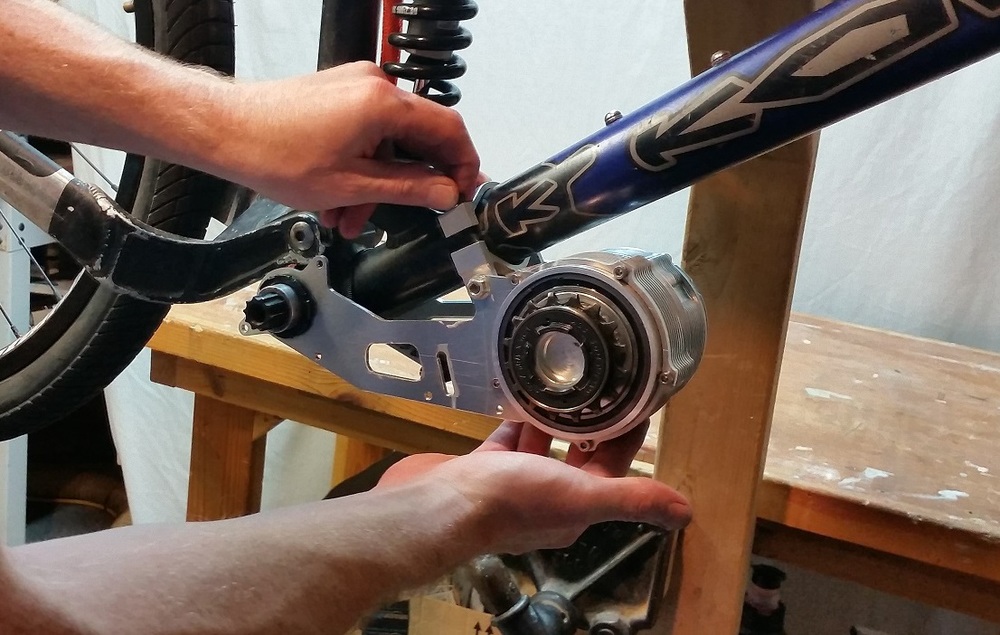
Here are some pics of the ‘finished’ bike.
I used quotation marks because it’s still not running as well as I had expected.
I’ve managed to find settings on the Adaptto controller that give around about the power consumption that you’d expect for a given speed. But the motor still overheats very quickly at pretty low power levels. With just 42mOhm phase resistance I thought it would it would take a decent amount of current without overheating but that doesn’t seem to be the case.
The power levels I’m using are around 4kW on acceleration and 1.5 – 2kW continuous for about 5 min then it will hit 100degC (starting from room temp) and I have to stop to let it cool.
So then I looked at what other factors would make it use excessive power. Did some fine adjustments to chain alignment – no difference. Tried some different amount of chain slack – no difference. Tried inflating the tyres to their max rated pressure – no difference.
I thought maybe the clearance between the motor can and aluminium mounting hardware might be too small which would induce eddy currents in the aluminium from the leakage magnetic flux – but no noticeable heat generated in the mounting hardware so I ruled that out.
The skirt bearing of this motor has been known to generate a bit of heat so I tried running the motor unloaded at high speed for a few min – Couldn’t notice any significant heat generated from the bearing.
When re-winding the motor I went for a high turn count to get a user friendly speed constant to try to get it to work with a single stage gear reduction. I know that reducing the kv of a motor means that I will need to run a higher battery voltage to get decent power. I thought 16S lipo (60V) would be a reasonable voltage and still work well with the single stage reduction. Guess not.
My conclusion is that this set up needs either lower gearing (2 stage reduction) and higher kv motor, or lower gearing (2 stage reduction) and higher voltage.
Seriously considering going to plan B which is to put a big hub motor on it..

")