ram0nb said:
I have some ideas of creating a sensored bldc controller based on an Arduino myself for a while now. Never came any further then a diagram and the beginning of a pcb design.
Hello ram0nb.
I want to make a controller because I have some needs, like:
-
Available kilometers for traveling: indication of the energy available in the battery and estimation of available Kms for traveling. The controller monitors the voltage and current used from the battery and also monitors the rotation of the motor/wheel.
-
Cruise control: possibility of cruise control but with constant control of speed(automatic control of current) and not constant power as current market controllers.
- Maximum power/current: possibility to configure the maximum power/current used by the motor.
-
Ramp acceleration: possibility to control the ramp of acceleration.
Sure I use cheap KU123 controller (equal to KU63 controller, but for more amps) right now on my bicycle, but I would like to build my own to test my ideas and use them if they work.
I am now with a more powerful microcontroller (ARM 32 bits 48MHz) than the AVR 8 bits 20MHz of Arduino but when I have the code/algorithms tested, we can port them to AVR/Arduino.
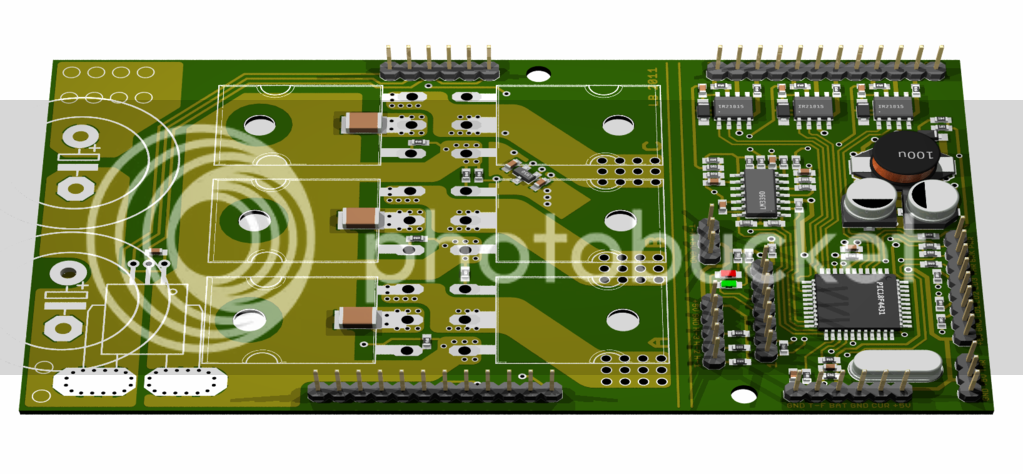
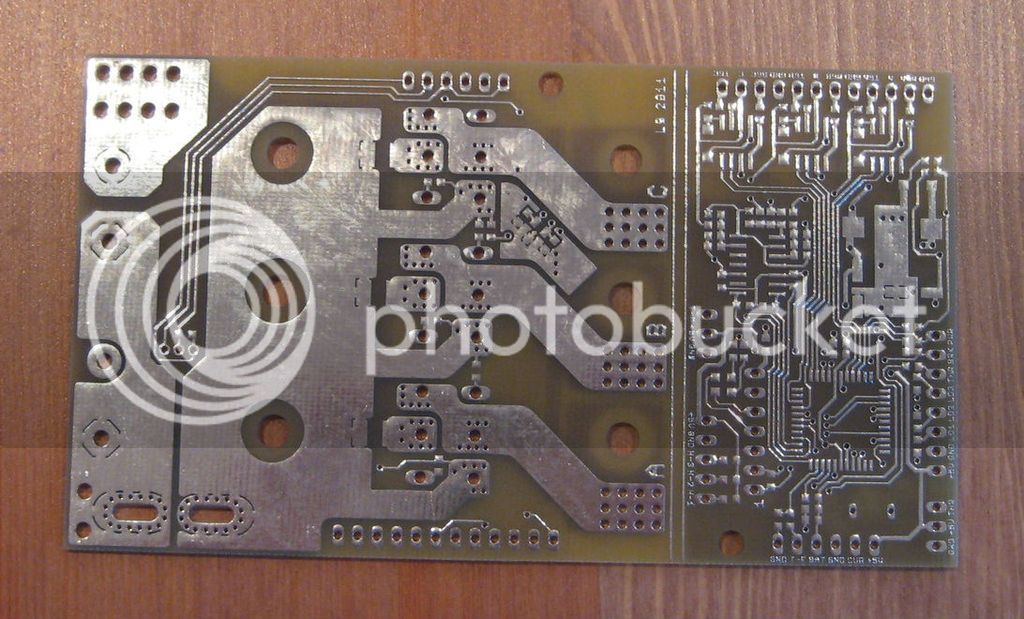
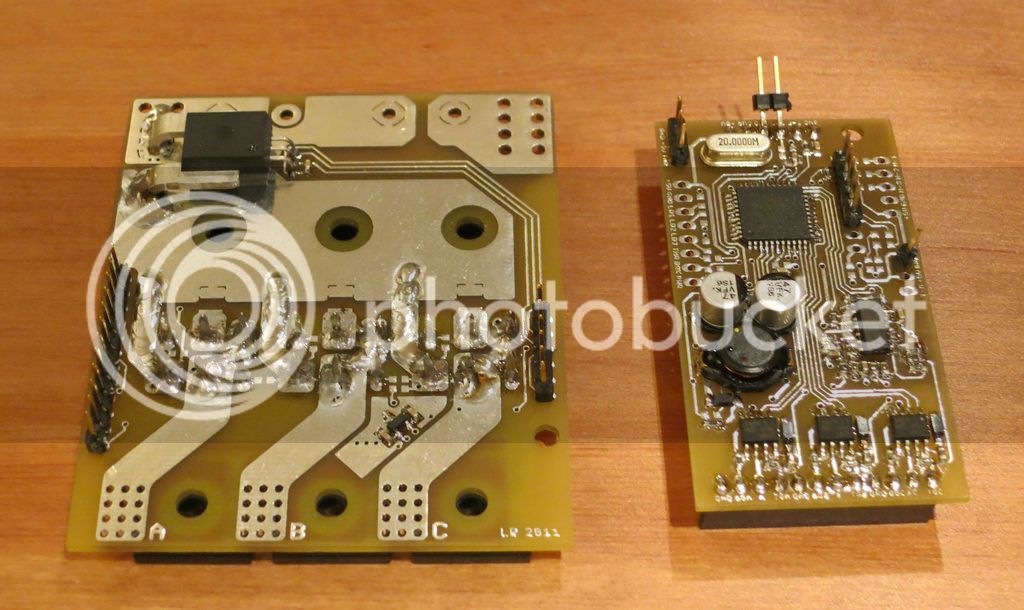
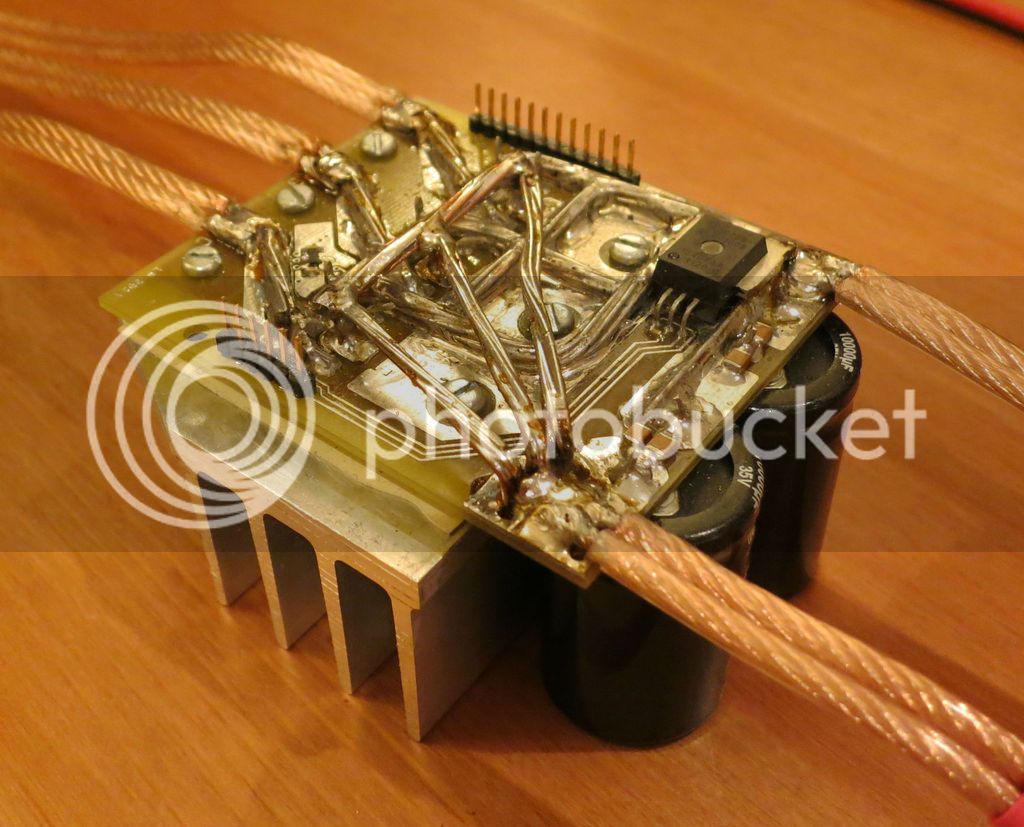
I am trying to take a short cut by using a KU63 controller and just exchange his microcontroller by my own ARM LPC2103 32 bits 48MHz. I need to learn and test the controller.
ram0nb said:
My final goal is to develop a 80V 50A BLDC controller with wifi ap and webserver (or bt) for communications with smartphone to control and monitor my ebike.
Will have a look for the my controller design files in Eagle. Can post those if any interest.
My final goal is to learn and build something I can use. And I will start for something low, like the KU63 controller for 24V. KUxxx controllers are almost the same hardware but they go up to 500W motor and 24/36 and 48V.
For Smart Phones, I will use cheap Bluetooth modules because they work, I used them on my projects like this:
Smart Scale
Yes, please share, we can always learn. Thank you.
You can always join this project, maybe following my idea of using KU63 controller and a microcontroller board... together we will get further.

")