
CargoMechanic
1 µW
Hey guys,
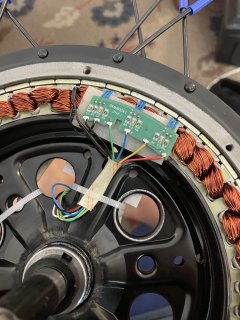
I have just fixed damaged motor cable for a friend of a friend on an NB Power direct drive motor. The cable was damaged where it exits the motor axle. I have shortened the cable and re-soldered the hall effect sensor and phase wires. This is a job I have done numerous times without any issues. I have triple checked my connections inside the motor and out and everything appears good.
Unfortunately when I connect the motor up to a KT controller and 36v battery to test, the motor is completely unresponsive, there isn't any motor shuddering or noise, nothing. I have tried adjusting the P1 motor characteristics setting on the KT display but it doesn't make any difference.
I have just tested a 500w planetary geared motor with the same controller and it runs perfectly.
Unfortunately I don't have the original ebike kit with me to test the motor. I believe this is the kit here: http://www.nbpowers.com/pd.jsp?id=33
Any advice would be much appreciated.
Thanks, Jasper
I have just fixed damaged motor cable for a friend of a friend on an NB Power direct drive motor. The cable was damaged where it exits the motor axle. I have shortened the cable and re-soldered the hall effect sensor and phase wires. This is a job I have done numerous times without any issues. I have triple checked my connections inside the motor and out and everything appears good.
Unfortunately when I connect the motor up to a KT controller and 36v battery to test, the motor is completely unresponsive, there isn't any motor shuddering or noise, nothing. I have tried adjusting the P1 motor characteristics setting on the KT display but it doesn't make any difference.
I have just tested a 500w planetary geared motor with the same controller and it runs perfectly.
Unfortunately I don't have the original ebike kit with me to test the motor. I believe this is the kit here: http://www.nbpowers.com/pd.jsp?id=33
Any advice would be much appreciated.
Thanks, Jasper

")