Kirill
100 W
- Joined
- Dec 10, 2019
- Messages
- 137
Hi everyone!
How to measure the angle of hall sensors?
The manufacturer of the DD motor Suringmax SR35HD 1500Watt claims that in this motor the Hall sensors have the angle of 120 degrees.
But the motor with such the angle value doesn’t work. The bike simply doesn’t move. Only idle speed with clicks.
Self-learning of the controller gives a different angle from 59 to 70.
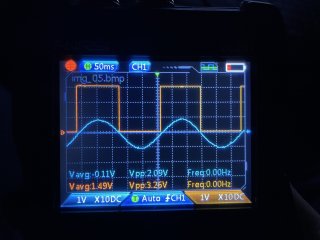
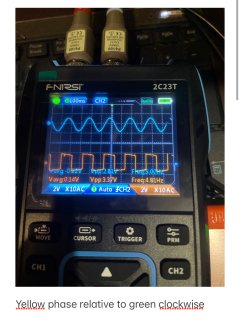
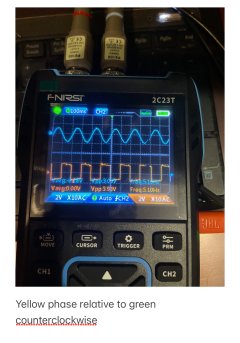
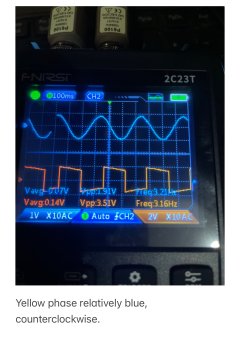
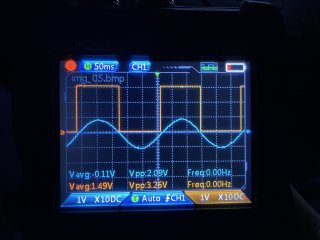
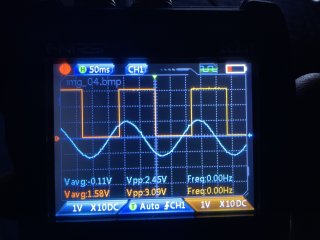
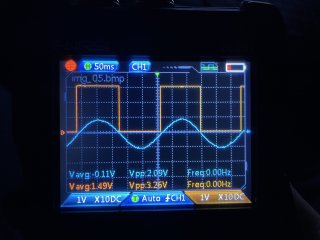
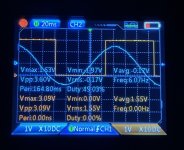
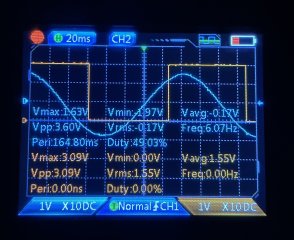
I decided to measure the angles using an oscilloscope.
Here are the measurements. But I don't know how to interpret them.
How to measure the angle of hall sensors?
The manufacturer of the DD motor Suringmax SR35HD 1500Watt claims that in this motor the Hall sensors have the angle of 120 degrees.
But the motor with such the angle value doesn’t work. The bike simply doesn’t move. Only idle speed with clicks.
Self-learning of the controller gives a different angle from 59 to 70.
I decided to measure the angles using an oscilloscope.
Here are the measurements. But I don't know how to interpret them.







")