Ok, so...first some info on how SB Cruiser
https://endless-sphere.com/forums/viewtopic.php?f=2&t=67833&start=625#p1355631

works now, and then how I'd like it to work, once the new equipment is installed. Note that I havent' yet gone thru the latest CAv3.1 beta / etc firmware features to see if what I want is even completely possible yet, but we'll get there later. Apologies for the length of this post; there's a lot to cover, and didn't want to split it up into separate posts yet, but for those replying to just one part at a time, it is probably better split taht way. For now, basic ideas are sectioned off with rows of ******* .
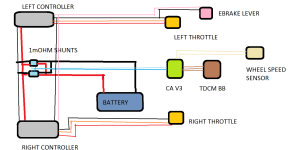
I will shortly have a functional Cycle Analyst v3 (vs the one I have that was killed by the short at the wire-exit area of the SA shunt between B+ and SPD years back), and I already have a THUN BB, and I think this CA is coming to me with a TDCM BB, so I can use whichever one works better for my purposes--either one will fit the SB Cruiser's BB shell. (if not, I can change the BB shell out).
I'm going to use this to add Torque PAS control to the trike so I can control speed via pedalling, without using the throttles at all, but still be able to use independent left/right throttles.
The system is 14s NMC, so AFAICR I'll need a separate power supply for the torque-sensing BB, so the CA doesn't fry it's internal one from overcurrent. (I did that to my original CA v3; the first thing I blew up on it). I already have a "12v" lighting system that runs on 4s NMC, which I can run a regulator off of for the 10v (IIRC) the BB will need. I might have to connect the systems' grounds to a common point, as I think I disconnected them completely from each other back when I redid all the main battery-to-controller wiring. I could also use a 10VDC wallwart powered off the main traction pack (14s) if I have one that will operate at that low a voltage reliably.
The CA will use an external shunt, whcih is two of the regular Grin SA shunts wired in parallel, for half the shunt resistance (because this system draws over 100A peak at startup from a stop, and can draw 120-130A sometimes in those situations, eventually I'll have better controllers that can do even more). Less voltage drop everywhere along the line is better for more power to the wheels.
**********************************************
I will also use it to be able to have a speed limiter if I want it (so I don't have to constantly keep an eye on the speedometer, which takes my eyes off the road, to be sure I don't exceed the 20MPH limit we have here). However, I need to have an instant-override button on that, somewhere right on the throttle body or thumb tab, so that if I end up in a traffic situation in which the only safe way out is to accelerate quickly, I can still do that. (it has happened a few times over the years with CrazyBike2, and a couple of times with the trike, where brakign would have gotten me squished, and only accelerating momentarily out of the situation made a happy ending. Years back on plain-old-pedal-bikes I could do that with my legs but nowadays I couldn't even if my bikes were light enough).
Whether the override uses a CA function, or simply directly connects the throttle to the contrller and bypasses the CA's throttle output completely doesn't matter--whatever works and works reliably in all situations.")
*****************************************************
Presently, I have a "generic" controller and DD hub on each side of the rear of the trike, each with it's own independent throttle, and common ebrake connection. Like most of my stuff, it's all a hodgepodge of parts, so the two motors are different (even once I have two of teh same motors on there, they'll still be different winds), and the controllers are different. (someday I'll get a pair of Lebowski's finished, but I don't know when that will happen).
Independent throttle is very useful for steering, by having extra power on the outside wheel, and no or minimal power on the inside wheel, and I'm very used to doing this myself automatically. I can make pretty sharp turns (considering the trike design) at almost cruising speed (20MPH) depending on road conditions.
It's also handy to be able to use just one motor if something has gone wrong with one side or the other, without having to get down there and cut wires (or install switches to disconnect oen or the other, even though I may do that too eventually).
It's also useful when backing up, since I have reverse on each motor (wired to switch both to reverse with a single button) and can use each one at the speed needed to back up in a particular direction, really useful with a heavy trailer full of cargo (or dog).
So I don't want that to go away; in a turn I'd stop pedalling (to stop Torque PAS from controlling the system while I do the throttle thing), and just use each throttle as needed. Obviously since the CA only has one throttle input and output, these throttles will not go thru the CA, but instead will go straight to the controllers. That's where one other problem will crop up I haven't figured out a solution for, to be discussed later: I'd like the CA to be able to limit speed to 20MPH, but it has to have control of the throttle to do that--it won't be able to do this the way I need to wire up throttle-to-controller..
**********************************************************
At some point, I'd like to develop a little box that is a steering-controlled "differential throttle", where it senses the steering position (and possibly how quickly I am turning the steering into that direction) and wheelspeed, and uses that info to alter the throttle input to each controller to do this kind of steering for me, without independent throttles. (I have throttles to take apart for the sensors and magnets to do the steering detection experiments). But that's a separate thing for later, only mentioned now in case anyone has ideas on doing that in hardware since I'm not a programmer and hardware is easier for me. I already have a basic idea for it, will post that up later on once I get it out of my head and onto paper. This box would also solve the above problem of limiting, as it would "handle" all the throttle voltage sources and outputs as two independent but interactive channels.
**********************************************************
I also actually have a glimmer of an idea on how to feed the two throttles into the CA via an external "router" box, and "split" them back out to two controllers, so that in the case of me using the left throttle as override to the PAS, it detects a voltage out from the left throttle, then disconnects the CA's throttle output from the righthand controller, and feeds it only ot the left. And similarly for the right. And if I am using both throttles, it feeds the voltage to both controllers. I dont' know the exact circuit to do this, but I can probably do it with transistors or op-amps, messy as that might be. (an MCU would be better but someone else would have to write the code and whatnot; I have very little idea how to do that).
**********************************************************
Back to the main throttle control function: each of the throttles on the separate controllers would override the Torque PAS throttle output from the CA, meaning:
-- if I was pedalling hard enough to get say, 15MPH out of the system, then if I push both throttles up to full, the voltage from them will be higher than that from the CA so the system will slam on max power.
-- If I was pedalling for that 15MPH and used just the left throttle, then the righthand motor and controller will keep doing whatever the CA / PAS was telling it to, but the lefthand one would be doing whatever the throttle was telling it, once it's voltage was higher than the CA's output. And vice-versa right vs left.
The throttle mode may change, but at first I'll probably have it be speed mode; later I'll experiment with other modes, which may change how everything else is setup and works depending on how it changes the feel/operation.
**************************************************
Braking will remain common, both motors engaged at teh same time (avoids brake-steer, which is a PITA and makes for some unpredictability in sudden stops in traffic). Note taht the left motor has on/off EABS, where it actively powers the motor to a stop, while the rigth motor has on/off regen, of a bit less capability than the lefthand EABS but I'm used to it and compensate steering as I brake. This braking assymetry stuff is one reason I want to change to the Lebowski controllers. Proportional EABS is another big one.
********************************************************
At this time I'm not really thinking about mulitple presets of different setups, but I might want that too eventually.
Also not going to limit power, as I need all the power I have (and more) as it is. There's no power limit presently in AZ, so no need to do so (except for extending range, and I might want a "preset" that does it for that reason). I do want the *option* to add a power limit, in case someone someday gets picky about it if they ever actually do change the law to include one, *and* it is strictly enforced (the day before they do that is the last day it'll be as safe as it is now to ride in traffic hauling cargo/dogs, and I"ll probably have to move to sidewalks where it's actually more dangerous for a number of reasons--but that's outside the scope of this thread).
I'm pretty tired so I probably forgot stuff or lost train of thought in some of what's above, so questions and thoughts are welcome; I'll answer as thoroughly as I can.
https://endless-sphere.com/forums/viewtopic.php?f=2&t=67833&start=625#p1355631
works now, and then how I'd like it to work, once the new equipment is installed. Note that I havent' yet gone thru the latest CAv3.1 beta / etc firmware features to see if what I want is even completely possible yet, but we'll get there later. Apologies for the length of this post; there's a lot to cover, and didn't want to split it up into separate posts yet, but for those replying to just one part at a time, it is probably better split taht way. For now, basic ideas are sectioned off with rows of ******* .
I will shortly have a functional Cycle Analyst v3 (vs the one I have that was killed by the short at the wire-exit area of the SA shunt between B+ and SPD years back), and I already have a THUN BB, and I think this CA is coming to me with a TDCM BB, so I can use whichever one works better for my purposes--either one will fit the SB Cruiser's BB shell. (if not, I can change the BB shell out).
I'm going to use this to add Torque PAS control to the trike so I can control speed via pedalling, without using the throttles at all, but still be able to use independent left/right throttles.
The system is 14s NMC, so AFAICR I'll need a separate power supply for the torque-sensing BB, so the CA doesn't fry it's internal one from overcurrent. (I did that to my original CA v3; the first thing I blew up on it). I already have a "12v" lighting system that runs on 4s NMC, which I can run a regulator off of for the 10v (IIRC) the BB will need. I might have to connect the systems' grounds to a common point, as I think I disconnected them completely from each other back when I redid all the main battery-to-controller wiring. I could also use a 10VDC wallwart powered off the main traction pack (14s) if I have one that will operate at that low a voltage reliably.
The CA will use an external shunt, whcih is two of the regular Grin SA shunts wired in parallel, for half the shunt resistance (because this system draws over 100A peak at startup from a stop, and can draw 120-130A sometimes in those situations, eventually I'll have better controllers that can do even more). Less voltage drop everywhere along the line is better for more power to the wheels.
**********************************************
I will also use it to be able to have a speed limiter if I want it (so I don't have to constantly keep an eye on the speedometer, which takes my eyes off the road, to be sure I don't exceed the 20MPH limit we have here). However, I need to have an instant-override button on that, somewhere right on the throttle body or thumb tab, so that if I end up in a traffic situation in which the only safe way out is to accelerate quickly, I can still do that. (it has happened a few times over the years with CrazyBike2, and a couple of times with the trike, where brakign would have gotten me squished, and only accelerating momentarily out of the situation made a happy ending. Years back on plain-old-pedal-bikes I could do that with my legs but nowadays I couldn't even if my bikes were light enough).
Whether the override uses a CA function, or simply directly connects the throttle to the contrller and bypasses the CA's throttle output completely doesn't matter--whatever works and works reliably in all situations.
*****************************************************
Presently, I have a "generic" controller and DD hub on each side of the rear of the trike, each with it's own independent throttle, and common ebrake connection. Like most of my stuff, it's all a hodgepodge of parts, so the two motors are different (even once I have two of teh same motors on there, they'll still be different winds), and the controllers are different. (someday I'll get a pair of Lebowski's finished, but I don't know when that will happen).
Independent throttle is very useful for steering, by having extra power on the outside wheel, and no or minimal power on the inside wheel, and I'm very used to doing this myself automatically. I can make pretty sharp turns (considering the trike design) at almost cruising speed (20MPH) depending on road conditions.
It's also handy to be able to use just one motor if something has gone wrong with one side or the other, without having to get down there and cut wires (or install switches to disconnect oen or the other, even though I may do that too eventually).
It's also useful when backing up, since I have reverse on each motor (wired to switch both to reverse with a single button) and can use each one at the speed needed to back up in a particular direction, really useful with a heavy trailer full of cargo (or dog).
So I don't want that to go away; in a turn I'd stop pedalling (to stop Torque PAS from controlling the system while I do the throttle thing), and just use each throttle as needed. Obviously since the CA only has one throttle input and output, these throttles will not go thru the CA, but instead will go straight to the controllers. That's where one other problem will crop up I haven't figured out a solution for, to be discussed later: I'd like the CA to be able to limit speed to 20MPH, but it has to have control of the throttle to do that--it won't be able to do this the way I need to wire up throttle-to-controller..
**********************************************************
At some point, I'd like to develop a little box that is a steering-controlled "differential throttle", where it senses the steering position (and possibly how quickly I am turning the steering into that direction) and wheelspeed, and uses that info to alter the throttle input to each controller to do this kind of steering for me, without independent throttles. (I have throttles to take apart for the sensors and magnets to do the steering detection experiments). But that's a separate thing for later, only mentioned now in case anyone has ideas on doing that in hardware since I'm not a programmer and hardware is easier for me.
I already have a basic idea for it, will post that up later on once I get it out of my head and onto paper. This box would also solve the above problem of limiting, as it would "handle" all the throttle voltage sources and outputs as two independent but interactive channels. **********************************************************
I also actually have a glimmer of an idea on how to feed the two throttles into the CA via an external "router" box, and "split" them back out to two controllers, so that in the case of me using the left throttle as override to the PAS, it detects a voltage out from the left throttle, then disconnects the CA's throttle output from the righthand controller, and feeds it only ot the left. And similarly for the right. And if I am using both throttles, it feeds the voltage to both controllers. I dont' know the exact circuit to do this, but I can probably do it with transistors or op-amps, messy as that might be. (an MCU would be better but someone else would have to write the code and whatnot; I have very little idea how to do that).
**********************************************************
Back to the main throttle control function: each of the throttles on the separate controllers would override the Torque PAS throttle output from the CA, meaning:
-- if I was pedalling hard enough to get say, 15MPH out of the system, then if I push both throttles up to full, the voltage from them will be higher than that from the CA so the system will slam on max power.
-- If I was pedalling for that 15MPH and used just the left throttle, then the righthand motor and controller will keep doing whatever the CA / PAS was telling it to, but the lefthand one would be doing whatever the throttle was telling it, once it's voltage was higher than the CA's output. And vice-versa right vs left.
The throttle mode may change, but at first I'll probably have it be speed mode; later I'll experiment with other modes, which may change how everything else is setup and works depending on how it changes the feel/operation.
**************************************************
Braking will remain common, both motors engaged at teh same time (avoids brake-steer, which is a PITA and makes for some unpredictability in sudden stops in traffic). Note taht the left motor has on/off EABS, where it actively powers the motor to a stop, while the rigth motor has on/off regen, of a bit less capability than the lefthand EABS but I'm used to it and compensate steering as I brake. This braking assymetry stuff is one reason I want to change to the Lebowski controllers. Proportional EABS is another big one.
********************************************************
At this time I'm not really thinking about mulitple presets of different setups, but I might want that too eventually.
Also not going to limit power, as I need all the power I have (and more) as it is. There's no power limit presently in AZ, so no need to do so (except for extending range, and I might want a "preset" that does it for that reason). I do want the *option* to add a power limit, in case someone someday gets picky about it if they ever actually do change the law to include one, *and* it is strictly enforced (the day before they do that is the last day it'll be as safe as it is now to ride in traffic hauling cargo/dogs, and I"ll probably have to move to sidewalks where it's actually more dangerous for a number of reasons--but that's outside the scope of this thread).
I'm pretty tired so I probably forgot stuff or lost train of thought in some of what's above, so questions and thoughts are welcome; I'll answer as thoroughly as I can.