
I bought this cargo trike (photo attached) that the previous own converted to into a e-bike. It has two 500w front motors, on the front, with two controllers wired in parallel to drive the motors, but there are a few issues with it I am trying to resolve.
1. Torque steer on throttle - the left hand wheel is mounted backwards to keep the disc brakes and cabling on the inside edge, my understanding of electric motors is that they have less torque in reverse, and as a result the bike steers left under throttle.
2. Battery cut off - this rig should have 2x50A batteries but it only has one (and it's unbranded china battery so the rating is suspect), but as a result going more than half throttle causes the BMS to trip, and the BMS needs its 120v charger to rest. This would be tragic away from home with a load of cargo.
3. Steering at speed is sketchy, this thing doesn't be to scoot hard.
Long term I'd like to get a better battery, and ESC with current/speed limiting, and if there is a dual motor controller that supports speed syncing wheels I'm interested in hearing about solutions, but I suspect I bought a weird setup.
That said, I've spent all my play money and I am looking for a solution I can scratch out of my pile of electronics parts.
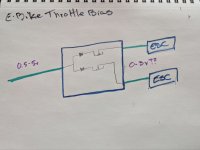
Introducing the biased throttle limiter. I suspect this will work based on my high school electronics background. Using a common 1n4148 diode and two 5K potentiometers I should be able to reduce the throttle signal by 50% and add the the ability to the bias the singal to motor and reduce torque steer.
Is this just crazy enough to work?
1. Torque steer on throttle - the left hand wheel is mounted backwards to keep the disc brakes and cabling on the inside edge, my understanding of electric motors is that they have less torque in reverse, and as a result the bike steers left under throttle.
2. Battery cut off - this rig should have 2x50A batteries but it only has one (and it's unbranded china battery so the rating is suspect), but as a result going more than half throttle causes the BMS to trip, and the BMS needs its 120v charger to rest. This would be tragic away from home with a load of cargo.
3. Steering at speed is sketchy, this thing doesn't be to scoot hard.
Long term I'd like to get a better battery, and ESC with current/speed limiting, and if there is a dual motor controller that supports speed syncing wheels I'm interested in hearing about solutions, but I suspect I bought a weird setup.
That said, I've spent all my play money and I am looking for a solution I can scratch out of my pile of electronics parts.
Introducing the biased throttle limiter. I suspect this will work based on my high school electronics background. Using a common 1n4148 diode and two 5K potentiometers I should be able to reduce the throttle signal by 50% and add the the ability to the bias the singal to motor and reduce torque steer.
Is this just crazy enough to work?




")