Watch a dirt bike race? Those guys arent pedaling and the mass of the bikes and wheels absolutely does affect handling. I just dont accept that a hub motor would be agile unless its rather small.
What you need to learn to accept is that unless you are racing on groomed mountain bike trails with jumps and whoops and things like that... it doesn't actually matter. Just because something exists in theory doesn't mean that it's actually going to cause you any issues in practice. In street driven bicycles it's not a problem.
Direct drive motors are a simple design. Elegant? Hardly.
Absolutely.
20mph on a bike with 26 inch wheels works out to about 330rpm or so.
So?
Again that is nowhere near the peak efficiency of those hub motors or the speed controllers that drive them.
I don't think you understand how motors work. If you are willing to spend money on high quality motor then efficiencies of DD hub motors can easily be well over the 80% range in practice. Cheap motors are in the more 75-80% range. Not simulated, not theoretical, but something that you can actually achieve on the street with street tires. Maybe up to 90% in ideal conditions if you have a very top of the line motor.
With a single speed reduction mid-drive, like I described in my previous post as the ideal motor setup for EVs, you can use a chain drive. Chain drives, if properly aligned and sized and cleaned and lubricated are the most efficient form of gearing available. Looking at something like 95% in practice. So you lose as low as 5% over DD on flat ground. When you get the chain offset, like on derailleurs, then efficiency drops. Belt drives are worse, efficiency wise, but because of the low maintenance they make up for it. Chain drives require a lot of work, relatively, to maintain peak efficiency.
So in situations were you are always accelerating and stopping or climbing hills then the single speed reduction motor wins over a direct drive. Better torque. For a EV it's a obvious win. No question about it. It's really not debatable. The problem is how to fit it on a bicycle. On motorcycles it's not a problem. Which is why they use this approach for high quality motor bikes.
Luckily bicycles are not high performance machines. So the downsides of DD hub motor are far less pronounced.
You seem to think that a 330 rpm is ridiculously slow for a ebike motor, but what about 75 rpm?
Conventional Ebike mid-drives, like you see sold by companies like Bosch, have to go through at least one stage of reduction, but more likely 2, before they ever get to the chains. Because they need to match the arbitrary cadence of a bicycle rider, which is in the 50-100 rpm range. Gear reduction are much less efficient then chain drives.
Something like a 20:1 gear reduction from a buzzing motor to the crank is, at best and under ideal conditions, probably around 76% efficient. Then you need to go through a chain on top of that. Derailleurs probably range in the 85-95% efficiency zone, depending on how offset the chain is.
So you have a .85 efficient motor * 0.76 * .85 to .95....
That's 54% to 61% efficient. Maybe with special lubrication and highly optimized gears a very high quality motor might get upwards to 70% at perfect speeds and cadence, but that is pushing it.
That's elegant? No, more like "monstrously ugly".
On top of that you now have a bicycle that is miserable to pedal. If you have a geared hub motor you won't reach the same efficiencies as a DD hub motor (in practice it doesn't matter noticeably), but at least you can have a nice time pedaling. If you use a controller that is capable of "virtual electric freewheeling" then you can pedal a DD hub motor like it doesn't exist and make up for the lost energy in regen.
You really need a specific situation to make up for all these downsides. Hill climbing competitions and going fast on mountain bike trails are were these sorts of convention bicycle mid-drive wins over hub motors.
And at slower speeds and during speed changes is where your batteries will really take a hit.
The speed isn't as super important as you imagine. It's torque output that matters.
Torque = Amps = heat.
If you are hauling up a hill efficiency dives because torque is high. You need high amperage to get high torque out of a motor and that produces a lot of heat. This is the advantage of having a mechanical gear reduction is simple: it's a torque multiplier. However you can achieve the same mechanical advantage by simply having a larger motor (wider and longer). In practice on large EVs single speed reduction and large motor is the best trade off.
However If you are just riding at a steady state then you'll get good efficiencies on a hub motor. No question about it. There is no disadvantage in just going slower with a hub motor.
https://ebikes.ca/tools/simulator.html?cont=BRL10&cont_b=BRL10&bopen=true&autothrot_b=true&throt_b=12.330654215834889&autothrot=true&hp_b=0&hp=0&axis=mph&throt=100&batt=B5220_GA&batt_b=B5220_GA
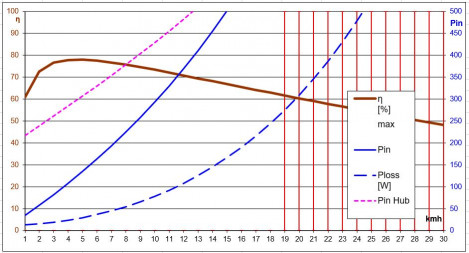
at 32mph this setup is 82.6% efficient.
Dropping to less then 15mph gets you a grand total of 2.6% drop in efficiency. That's a fart in the wind at these speeds.
Speeding up and slowing down a 14 lb motor takes a lot more energy vs spinning a relatively small hub motor and its gear reductions.
You can more then make it up with regen.
Regen isn't going to add tremendous range to any sort of electric bicycle, but it saves wear and tear on the brakes, which is it's best feature. And for the sort of stuff you are pointing out the benefits of regen dwarfs it's downsides.


 .
.