Hello all,
I have put together a farm motorcycle with Enertrac MHM603 hub motor and a Kelly KLS12301-8080I controller. I have a 100 volt pack which should be capable of around 140A continuous.
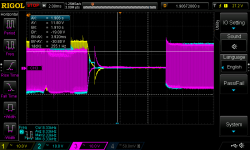
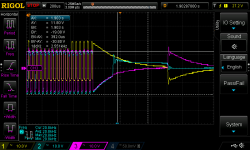
The setup works very well (smooth, good power,ridden for a couple of hours) except for one very specific scenario. If I give the motor a lot of throttle (tends to be at low speeds, steep hills etc) it can cut out very sharply, repeatedly and will quickly engage again, over and over until I let the throttle off.
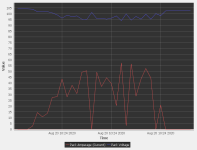
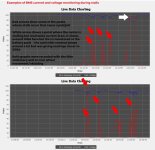
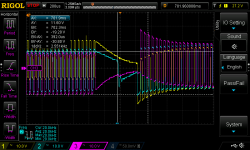
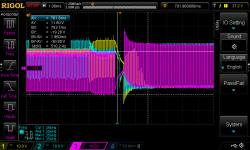
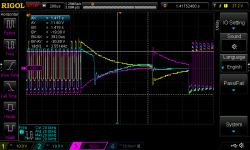
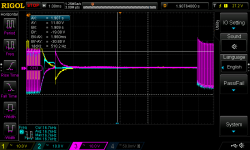
Before I go into details of my controller setup, voltage and current graphs during these episodes could someone please let me know what behavior one should expect from this kind of setup when a motor is overloaded/stalls etc?
For example, the first motorbike I built has a AC induction motor with a curtis controller. If I ride up to a wall and apply throttle, the motor loads up to around 50A (firmware limitation AFAIK) but doesn't cut out.
TLDR: What observable characteristics should I expect from this motor when it can't power up a hill etc... before I start theorizing on how to fix the cogging/jerking/cutting out?
Thanks
I have put together a farm motorcycle with Enertrac MHM603 hub motor and a Kelly KLS12301-8080I controller. I have a 100 volt pack which should be capable of around 140A continuous.
The setup works very well (smooth, good power,ridden for a couple of hours) except for one very specific scenario. If I give the motor a lot of throttle (tends to be at low speeds, steep hills etc) it can cut out very sharply, repeatedly and will quickly engage again, over and over until I let the throttle off.
Before I go into details of my controller setup, voltage and current graphs during these episodes could someone please let me know what behavior one should expect from this kind of setup when a motor is overloaded/stalls etc?
For example, the first motorbike I built has a AC induction motor with a curtis controller. If I ride up to a wall and apply throttle, the motor loads up to around 50A (firmware limitation AFAIK) but doesn't cut out.
TLDR: What observable characteristics should I expect from this motor when it can't power up a hill etc... before I start theorizing on how to fix the cogging/jerking/cutting out?
Thanks