So...this is probably going to be complicated, and requires some explanation of the setup, both as it is now where it doesn't work right, and as it was before when it did work fine. So...apologies for the length. I'm very tired after working on this for the last 12+ hours, so I'll probably miss things, if you have questions I'll clarify tomorrow.
Previous working setup was:
-- a just-prior-to-last generation Grinfineon in sensored mode running an MXUS 450x (can't remember which winding) on the left rear wheel of SB Cruiser,
and
-- a Phaserunner v6 running an ex-A2B Ultramotor on the right rear wheel.
-- Both in ~21-22" wheels (actual tire diameter).
-- Both driven simultaneously with paired throttle inputs from Cycle Analyst, but same results happen from direct throttle input so it isn't a CA issue, hence the CA's setup isn't covered here.
-- I could gently roll on throttle, or pedal, and slowly and smoothly accelerate or roll at just a very slow walking speed, or full on throttle or pedal fast and accelerate rapidly and smoothly up to 20MPH, completely silently in either case, from the motors.
Then on my way home from work Saturday, something large and metal fell off the back of a truck full of junk as it passed me, and went under my left wheel before I could do anything about it, and damaged the tire; I was forced to ride the remaining mile and a half or so on the flat, with four broken spokes. Surprisingly the rim itself wasn't apparently damaged; all previous road-debris/condition encounters have damaged the rim and not the spokes (and sometimes the tire but not like this).
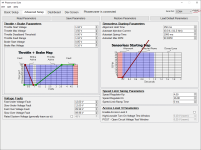
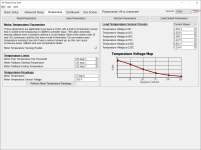
Anyway, since I already had the rim and spokes and spare Ultramotor, and had already planned to do this whenever the time and energy happened simultaneously, I decided to change the entire wheel out now. The plan had been to just swap the wheel out and run it off the Grinfineon as the MXUS had been, but the Andersons on the cable with the UM were apparently so poorly crimped (from factory?) on the controller-side cable extension that two of the contacts and shells just fell off as I was lacing the motor into the rim. Since I was going to have to redo the connectors anyway, I thought "hey, why not try out that old PR v1", so I set the motor up in a bike frame upside down as a test stand, since I hadn't put a tire and tube on it anyway. The PRv1 successfully autotuned the UM, though interestingly even though they're both ex-A2B motors they're different windings:
Since I was going to have to redo the connectors anyway, I thought "hey, why not try out that old PR v1", so I set the motor up in a bike frame upside down as a test stand, since I hadn't put a tire and tube on it anyway. The PRv1 successfully autotuned the UM, though interestingly even though they're both ex-A2B motors they're different windings:
--rightside ultramotor 102.0mohms 571uh 8poles 8.81rpm/v
--this leftside ultramotor 76.0mohms 394uh 9.21rpm/v
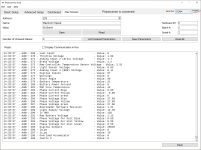
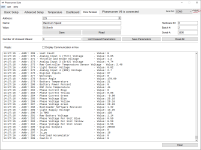
and the PR insists that the green hall is stuck high, and yellow hall stuck low, so it will only run sensorless. I haven't manually tested the halls yet, but they do activate on the PRSuite dashboard tab, as I manually slowly rotate the wheel, so they aren't actually stuck and I don't get why the PRv1 thinks they're stuck. So I left it in the sensorless mode it defaults to when this happens, and saved all the parameters to the PRv1, along with my working system settings as used on the first PR (v6), such as battery voltage, throttle range, regen, etc etc.
All other settings in the PRv1 are (like those in the v6) left at the PR defaults. No manual tuning of the system has been done, as none was needed on the PRv6 to make it work "perfectly".
I then spent a few hours getting the new wheel onto the SBC and mount the PRv1 and wire it in (no need to detail that here). Then I test rode it around the yard, and it performs AWFULLY, even the PRv6!
Issues:
--Because the PRv1 is running sensorless, it pretty much ALWAYS jerks backwards before going forwards...I'd expect a 50/50 chance of the right direction, but I think it happened only once in all the startups (under load or offground...offground is a problem because the pedal drive chain goes to that motor, to a freewheel on the inboard (left) side of it....) There's no errors or LED flash codes.
--The PRv6 is jerky and noisy; feels as if it's running intermittently on a single phase, or a sensor problem, but there are no LED flash codes and no errors on the PR setup program. Nothing has changed on that wheel or motor or wiring, so it should perform exactly as it did beforre, which should be working perfectly.
--Between the two of them it barely will even get started from a stop on PAS, and mostly can't start from a stop on throttle. If it weren't for my pedalling pushing it started forward, it probably wouldn't start from a stop on PAS either.
--Once it does get going, it still feels rough and doesn't have the push it should, especially for a system with two PRs on it, set to 90A phase, 40A battery, 52v system. (normally with the previous setup it would pull up to 80A between the Grinfineon and the PRv6 for a few seconds as it hauled me up to 20mph....not seeing more than 10A *total* now, which is ridiculously low for this setup).
--sometimes, but not always, the UM on the right side run by the PRv6 makes hissing sounds (like I used to hear from the MXUS motors when I was testing the SFOC5 several years ago, as a natural part of how that controller worked). I don't recall that ever happening before with the PRv6, and the PRv1 isn't doing it.
I gave up at midnight because I couldn't focus my eyes on tools and wires anymore, went inside and have been writing this up as I doze and wake; eventually hopefully I'll really fall asleep but no sign of that yet.
Tomrrow (well, today, since it's about 2am now) I'm going to put PP45s on the UM's extension cable and verify it's hall sensor operation, then set it up with the Grinfineon, and see if things work correctly at least on that side, and see if ti makes the PRv6 suddenly magically work right.
Any ideas are welcome, keeping in mind that the PRv6 / UM combo on the right side worked perfectly fine with all it's settings exactly as they are right now, until I swapped out the leftside motor and controller....I just don't get it. :/
The PRv1 hasn't been tested (by me, anyway) until now, and neither has the UM it's running, so either or both of those could actually have a problem, or there may be manual tuning required.
Previous working setup was:
-- a just-prior-to-last generation Grinfineon in sensored mode running an MXUS 450x (can't remember which winding) on the left rear wheel of SB Cruiser,
and
-- a Phaserunner v6 running an ex-A2B Ultramotor on the right rear wheel.
-- Both in ~21-22" wheels (actual tire diameter).
-- Both driven simultaneously with paired throttle inputs from Cycle Analyst, but same results happen from direct throttle input so it isn't a CA issue, hence the CA's setup isn't covered here.
-- I could gently roll on throttle, or pedal, and slowly and smoothly accelerate or roll at just a very slow walking speed, or full on throttle or pedal fast and accelerate rapidly and smoothly up to 20MPH, completely silently in either case, from the motors.
Then on my way home from work Saturday, something large and metal fell off the back of a truck full of junk as it passed me, and went under my left wheel before I could do anything about it, and damaged the tire; I was forced to ride the remaining mile and a half or so on the flat, with four broken spokes. Surprisingly the rim itself wasn't apparently damaged; all previous road-debris/condition encounters have damaged the rim and not the spokes (and sometimes the tire but not like this).
Anyway, since I already had the rim and spokes and spare Ultramotor, and had already planned to do this whenever the time and energy happened simultaneously, I decided to change the entire wheel out now. The plan had been to just swap the wheel out and run it off the Grinfineon as the MXUS had been, but the Andersons on the cable with the UM were apparently so poorly crimped (from factory?) on the controller-side cable extension that two of the contacts and shells just fell off as I was lacing the motor into the rim.
--rightside ultramotor 102.0mohms 571uh 8poles 8.81rpm/v
--this leftside ultramotor 76.0mohms 394uh 9.21rpm/v
and the PR insists that the green hall is stuck high, and yellow hall stuck low, so it will only run sensorless. I haven't manually tested the halls yet, but they do activate on the PRSuite dashboard tab, as I manually slowly rotate the wheel, so they aren't actually stuck and I don't get why the PRv1 thinks they're stuck. So I left it in the sensorless mode it defaults to when this happens, and saved all the parameters to the PRv1, along with my working system settings as used on the first PR (v6), such as battery voltage, throttle range, regen, etc etc.
All other settings in the PRv1 are (like those in the v6) left at the PR defaults. No manual tuning of the system has been done, as none was needed on the PRv6 to make it work "perfectly".
I then spent a few hours getting the new wheel onto the SBC and mount the PRv1 and wire it in (no need to detail that here). Then I test rode it around the yard, and it performs AWFULLY, even the PRv6!
Issues:
--Because the PRv1 is running sensorless, it pretty much ALWAYS jerks backwards before going forwards...I'd expect a 50/50 chance of the right direction, but I think it happened only once in all the startups (under load or offground...offground is a problem because the pedal drive chain goes to that motor, to a freewheel on the inboard (left) side of it....) There's no errors or LED flash codes.
--The PRv6 is jerky and noisy; feels as if it's running intermittently on a single phase, or a sensor problem, but there are no LED flash codes and no errors on the PR setup program. Nothing has changed on that wheel or motor or wiring, so it should perform exactly as it did beforre, which should be working perfectly.
--Between the two of them it barely will even get started from a stop on PAS, and mostly can't start from a stop on throttle. If it weren't for my pedalling pushing it started forward, it probably wouldn't start from a stop on PAS either.
--Once it does get going, it still feels rough and doesn't have the push it should, especially for a system with two PRs on it, set to 90A phase, 40A battery, 52v system. (normally with the previous setup it would pull up to 80A between the Grinfineon and the PRv6 for a few seconds as it hauled me up to 20mph....not seeing more than 10A *total* now, which is ridiculously low for this setup).
--sometimes, but not always, the UM on the right side run by the PRv6 makes hissing sounds (like I used to hear from the MXUS motors when I was testing the SFOC5 several years ago, as a natural part of how that controller worked). I don't recall that ever happening before with the PRv6, and the PRv1 isn't doing it.
I gave up at midnight because I couldn't focus my eyes on tools and wires anymore, went inside and have been writing this up as I doze and wake; eventually hopefully I'll really fall asleep but no sign of that yet.
Tomrrow (well, today, since it's about 2am now) I'm going to put PP45s on the UM's extension cable and verify it's hall sensor operation, then set it up with the Grinfineon, and see if things work correctly at least on that side, and see if ti makes the PRv6 suddenly magically work right.
Any ideas are welcome, keeping in mind that the PRv6 / UM combo on the right side worked perfectly fine with all it's settings exactly as they are right now, until I swapped out the leftside motor and controller....I just don't get it. :/
The PRv1 hasn't been tested (by me, anyway) until now, and neither has the UM it's running, so either or both of those could actually have a problem, or there may be manual tuning required.