speedmd said:
Looking at the prius chart, makes me wonder why would you not want to try just a low/high gear setup in addition to the FW controller. At the higher rpms you still have the same power, understood, but torque drops off drastically. You have 190 Nm at 3200 rpms and it drops to what looks like 40 Nm at 10000 rpms.
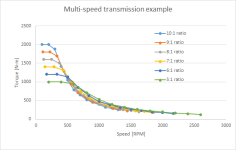
I think you may be overlooking the marginal gains you get from a multi-speed transmission unless you really need the low end torque. Lets consider an example:
if you did install a transmission with a 10:1 reduction and a second gear with a 5:1 reduction.
in the 10:1 (1st gear) you would get 2,000Nm at 100RPM, 790Nm at 600RPM and 295Nm at 1,200RPM
in the 5:1 (2nd gear) you would only get 1,000Nm at 100RPM, 940Nm at 600RPM and 395Nm at 1,200RPM
For anyone used to analyzing transmission torque-speed curves, it makes sense that you would shift to 2nd gear above 500RPM, or about 1/6th the top speed because that's where you have more torque available. Let's assume that the top speed of this machine is 120MPH (like liveforphysics' wicked quick electric bike). This means you should shift gears at just north of 20MPH.
Here's the real question, do you NEED the extra torque provided by the low gear? Personally for sizing the gear ratio of my electric conversion, I realized that I could spin the wheels at low speeds using a single ratio, and still hit a top speed of 127MPH, which is likely quicker than I ever will get it especially considering it's been sitting for a year... but I digress. Maybe I'm biased, but in my case, I had enough torque to overcome the traction of the rear wheels and I didn't need more than that.
If you can find a use for 2000N-m, then I can see the transmission being useful, or if the sweet spot of efficiency was more towards the low speed range, like it is for most engines.

")
