Hi All,
I’m a long time stalker of endless sphere and the great info available here, but this is my first post. I quite enjoy the electric vehicle thing and I have built three e-bikes (really just plug and play), I have an electric skateboard which is also occasionally used to get me to and from work. Occasionally I don’t fall off too which is nice.
My most recent project is also a bit of a step into the unknown for me as it’s a bit bigger and less plug and play than previous tinkerings. I’ve taken an old quad bike with a broken gear box and have almost finished converting it. This has been a lot more involved with modification to the chassis, making frames for the motor, battery and also including a new shaft to provide gear reduction via chain drive to get a bit more torque to the ground. I’ll post some pictures and write up when complete, it will have:
- Golden Motor 3kW HPM3000b
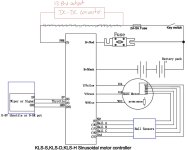
- Kelly Controller KLS 7218-M controller
- 20S-10P 34Ah battery from EM3EV (I didn’t build it myself but did make the box for it)
- Cycle Analyst for info and throttle control / limit
- 72V to 13.8v DC-DC converter for the quad bike lights, horn and to power the controller (12V source not the B+/B- which is from the battery at 72V nom).
Right now, I’ve encountered a bit of a problem. I can’t get the Kelly Controller to perform the auto identify function. I’ve had a good read through the posts here and I seem to be having different issues to others. When I perform the process there is no movement of the motor at all and after a while I just get an “internal error” and “identification error” message on the interface screen.
I have gone through the user programmable parameters and have reviewed the items that can be seen under the “monitor” window. It seems that all is working. I can see the hall sensors from the motor change when I rotate the motor. I can see the RPM change when I move the motor by hand. One of the posts shows the order the hall signals should be arranged and I seem to match this, so pretty sure I’ve wired it up right:
https://endless-sphere.com/forums/viewtopic.php?f=28&t=95368#p1398898
However, I have had no success when I have tried to run the identification.
When I start up the controller, I get.a repeating beep which I take to be 1-1 on the error code (I.e. perform identification). I enter 170 into the program and write it to the controller and turn it off, wait for a minute or so and re-start. On the re-start the beeping ceases and nothing else happens. The motor does not turn (at all) and remains completely still & silent. Most posts indicate some (erratic) movement of the motor as the controller tries to identify all the phases and hall arrangements. Nothing from mine at all.
After a short or a long time I get two error messages on the monitor screen, “internal error” and “identity error”. Once I saw a “reset error” but it was accompanied by the other two error messages. In all cases the motor did not move (some of the forums indicate there are a few movements of the motor.
At this point I have tried to either restart the controller (leaving 170 In the identity tab) and I have also tried writing 85 in the tab and then restarting the process. In both cases I just end up with the same result, that is the controller not doing anything.
When I write 85 in and restart, the error beeps start up again in the same repeating “beep, pause, beep” fashion as when I first started which I take to be the “1-1” error code to perform indentification.
I have been through all the wiring and measured voltages and all appears to be hooked up correctly and verified by the monitor tab. It also seems as if the program has identified the phase order for each of the hall signals and yet no change to the error codes and I cannot drive the motor at all.
It is as if there is no voltage provided from the controller at all.
I am running a 20S 10P Lipo battery (nominally 72V, charged to about 81-82 volts at the time of testing.
I have a cycle analyst to monitor with the throttle controlled via the CA. I have tested the output here from about 1v to 3.8v input to the controller.
I have seen one post that suggest putting diodes between the motor hall signal and the controller which I have not tried (yet) but as I can read the hall signals and RPM in the monitor tab on the controller software I believe the controller can identify the hall signals OK.
Any help appreciated!
(PS - I will try to upload some photos of the program GUI and layout, please excuse the wiring in the photos, it’s all a big mess as I’ve been trying to trace everything back to make sure it’s connected correctly). View attachment 6
View attachment 6
I’m a long time stalker of endless sphere and the great info available here, but this is my first post. I quite enjoy the electric vehicle thing and I have built three e-bikes (really just plug and play), I have an electric skateboard which is also occasionally used to get me to and from work. Occasionally I don’t fall off too which is nice.
My most recent project is also a bit of a step into the unknown for me as it’s a bit bigger and less plug and play than previous tinkerings. I’ve taken an old quad bike with a broken gear box and have almost finished converting it. This has been a lot more involved with modification to the chassis, making frames for the motor, battery and also including a new shaft to provide gear reduction via chain drive to get a bit more torque to the ground. I’ll post some pictures and write up when complete, it will have:
- Golden Motor 3kW HPM3000b
- Kelly Controller KLS 7218-M controller
- 20S-10P 34Ah battery from EM3EV (I didn’t build it myself but did make the box for it)
- Cycle Analyst for info and throttle control / limit
- 72V to 13.8v DC-DC converter for the quad bike lights, horn and to power the controller (12V source not the B+/B- which is from the battery at 72V nom).
Right now, I’ve encountered a bit of a problem. I can’t get the Kelly Controller to perform the auto identify function. I’ve had a good read through the posts here and I seem to be having different issues to others. When I perform the process there is no movement of the motor at all and after a while I just get an “internal error” and “identification error” message on the interface screen.
I have gone through the user programmable parameters and have reviewed the items that can be seen under the “monitor” window. It seems that all is working. I can see the hall sensors from the motor change when I rotate the motor. I can see the RPM change when I move the motor by hand. One of the posts shows the order the hall signals should be arranged and I seem to match this, so pretty sure I’ve wired it up right:
https://endless-sphere.com/forums/viewtopic.php?f=28&t=95368#p1398898
However, I have had no success when I have tried to run the identification.
When I start up the controller, I get.a repeating beep which I take to be 1-1 on the error code (I.e. perform identification). I enter 170 into the program and write it to the controller and turn it off, wait for a minute or so and re-start. On the re-start the beeping ceases and nothing else happens. The motor does not turn (at all) and remains completely still & silent. Most posts indicate some (erratic) movement of the motor as the controller tries to identify all the phases and hall arrangements. Nothing from mine at all.
After a short or a long time I get two error messages on the monitor screen, “internal error” and “identity error”. Once I saw a “reset error” but it was accompanied by the other two error messages. In all cases the motor did not move (some of the forums indicate there are a few movements of the motor.
At this point I have tried to either restart the controller (leaving 170 In the identity tab) and I have also tried writing 85 in the tab and then restarting the process. In both cases I just end up with the same result, that is the controller not doing anything.
When I write 85 in and restart, the error beeps start up again in the same repeating “beep, pause, beep” fashion as when I first started which I take to be the “1-1” error code to perform indentification.
I have been through all the wiring and measured voltages and all appears to be hooked up correctly and verified by the monitor tab. It also seems as if the program has identified the phase order for each of the hall signals and yet no change to the error codes and I cannot drive the motor at all.
It is as if there is no voltage provided from the controller at all.
I am running a 20S 10P Lipo battery (nominally 72V, charged to about 81-82 volts at the time of testing.
I have a cycle analyst to monitor with the throttle controlled via the CA. I have tested the output here from about 1v to 3.8v input to the controller.
I have seen one post that suggest putting diodes between the motor hall signal and the controller which I have not tried (yet) but as I can read the hall signals and RPM in the monitor tab on the controller software I believe the controller can identify the hall signals OK.
Any help appreciated!
(PS - I will try to upload some photos of the program GUI and layout, please excuse the wiring in the photos, it’s all a big mess as I’ve been trying to trace everything back to make sure it’s connected correctly).
View attachment 6