
No, total parasitic losses don't rise with the square of rpm. See Justin's post here for what I've done in the spreadsheet: http://www.endless-sphere.com/forums/viewtopic.php?p=981898#p981898crossbreak said:strange data. no load current should rise linearly, shouldn't it? It's all parasitic loss. which should rise with the square of rpm. So both no load voltage and current shall rise with rpm, doesn't they?
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Motor comparison spreadsheet
- Thread starter Miles
- Start date
crossbreak
1 MW
John in CR said:crossbreak said:we need a value for parasitic loss. like [Watts/rpm²]
We already have that...no-load current X voltage. The current is so low that copper losses are negligible, leaving just the parasitic losses. Measure the bare motor, and then again with wheel or gearing to get those parasitic losses at a given rpm.
Mile's spreadsheet goes further and computes the torque side of core losses.
Now i get it! It is divided into hysteresis loss, which rises linearly (constant torque: [Nm] ) and eddy current loss, which rises with the square of rpm (torque rising linearly with rpm[Nm/rpm]). In terms of loss, this constant would have the unit [Watts/rpm²]. quite simple, thanks for the link miles!
According to justin, we need the inductance figures to compute the shape of the torque vs. rpm curve. At least this should be added to the spreadsheet.
John in CR
100 TW
I thought hysteresis losses are fixed (ie the drag torque we have to overcome to pedal a non-freewheeling motor if you run out of juice) , and eddy current losses rise linearly with rpm. The killer that rises geometrically is copper losses, which rise by the square of current.
cycborg
1 kW
That's hysteresis and eddy current torque, but "loss" implies power, so you have to multiply the torque by RPM, giving you linear hysteresis loss and quadratic eddy current loss.John in CR said:I thought hysteresis losses are fixed (ie the drag torque we have to overcome to pedal a non-freewheeling motor if you run out of juice) , and eddy current losses rise linearly with rpm. The killer that rises geometrically is copper losses, which rise by the square of current.
Hey Miles.Miles said:This was developed from the ideas discussed in these threads:
http://www.endless-sphere.com/forums/viewtopic.php?p=980223#p980223
http://www.endless-sphere.com/forums/viewtopic.php?f=30&t=45489&p=663544
All columns are in protected mode, apart from the "speed" column, but there is no password needed to remove the protection.
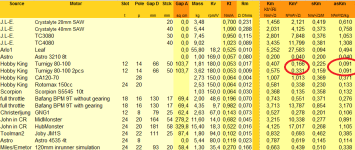
It seems the leaf motor is at 21.46 rpm per volt and at 4400 rpm is uses 1.9a at 205v for 389.5 watts this is dependent on settings. But it is my best and what we are looking for it how easy the motor will spin.
I have not had luck running it to higher voltage yet but the factory limit is 10,300 rpm so I want to get data at 115v 230v and 345v then make a graph to predict the 460v unloaded. Because once it runs well at 345v on the bench it will be getting the gear reduction added back on to be mounted in the car.
John in CR
100 TW
cycborg said:That's hysteresis and eddy current torque, but "loss" implies power, so you have to multiply the torque by RPM, giving you linear hysteresis loss and quadratic eddy current loss.John in CR said:I thought hysteresis losses are fixed (ie the drag torque we have to overcome to pedal a non-freewheeling motor if you run out of juice) , and eddy current losses rise linearly with rpm. The killer that rises geometrically is copper losses, which rise by the square of current.
Thx for making me look at it properly.
crossbreak
1 MW
Km should not change if changing motor termination. But it does: In WYE, the motor has double the Rm [Edit: no! triple] but only 1/sqrt(3)=0.577 of the KV! Thus the Km increases.
Kv would have to be decreased by 1/sqrt(2) to keep the same Km! This is not the case
Or Rm would have to be tripled, which is also not the case [Edit: this is actually the case!]
Where is the error? Anyone?
Kv would have to be decreased by 1/sqrt(2) to keep the same Km! This is not the case
Or Rm would have to be tripled, which is also not the case [Edit: this is actually the case!]
Where is the error? Anyone?
Attachments

crossbreak
1 MW
another thing: put 2 motors in parallel. Kv does not change. Rm is divided in half. Km is increased by sqrt(2)=1.41, it increases by 41%
What does this mean? Are two motors capable of producing 41% more torque? Obviously not. Funny to see that sKm changes as Well
What does this mean? Are two motors capable of producing 41% more torque? Obviously not. Funny to see that sKm changes as Well
Attachments

crossbreak said:Where is the error? Anyone?
crossbreak said:In WYE, the motor has double the Rm
crossbreak
1 MW
ouch  i forgot one path in Delta Δ termination. If one coil has 10mOhm, then phase to phase resistance is a parallel circuit of 1 coil and the series of the other 2 coils:
i forgot one path in Delta Δ termination. If one coil has 10mOhm, then phase to phase resistance is a parallel circuit of 1 coil and the series of the other 2 coils:
10 * (10 + 10) / 30 = 6.67 mohm. In Y it is two coils in series. So it is 20mOhm, so this is triple the resitance of the delta Δ termination.
10 * (10 + 10) / 30 = 6.67 mohm. In Y it is two coils in series. So it is 20mOhm, so this is triple the resitance of the delta Δ termination.
crossbreak
1 MW
crossbreak said:another thing: put 2 motors in parallel. Kv does not change. Rm is divided in half. Km is increased by sqrt(2)=1.41, it increases by 41%
What does this mean? Are two motors capable of producing 41% more torque? Obviously not. Funny to see that sKm changes as Well
We could just say: A motor that has double the Km, is capable of 4 times the torque. Just keep in mind that this a quadratic function. Still, it really bothers me that two same motors together have a different sKm than one alone
We could define sKm as the square-root of mass, then sKm would remain the same value for two same motors: sKm-> [Nm/√W/√M]
Another intersting topic is:
How can we now compare motors in a potential drive? We need to know something about the drive: minimum required torque, maximum weight and size, budget
now motors and reduction ratios could be compared, to gain the best efficiency. But what means best efficiency? Depending on the gearing, it will be better on hills (higher reduction ratio, lower I²R loss) then on the flats (higher reduction, higher parasitic loss). Maybe it would be useful to discuss this in a different thread, i just wanted to give an example here, since gearing influences Km as well
Example: Bafang BPM with 5:1 gearing (4.35 kg) and without it (2.0 kg), sorry i have no NoLoad figures at hand
Attachments

crossbreak
1 MW
then it is not related to mass as we know it. That lacks of sense.crossbreak said:We could define sKm as the square-root of mass, then sKm would remain the same value for two same motors: sKm-> [Nm/√W/√M]
My proposal: Use the square of this, so it gets the unit ../kg
Definition of alternative sKm:
asKm -> Km²/M
Using Km² is interesting. two same motors have twice the Km² of one!
Attachments
John in CR
100 TW
Way to go Crossbreak. I never liked Km as a number of meaning. Miles tried to give it meaning with sKm, but that only disguised its un-usefulness. I know we can come up with something better.
It makes no sense to me.Punx0r said:I do not follow your reasoning regarding the physics here. Are you simply creating random formulas to see what numerical values result?
crossbreak
1 MW
maybe it is a bit like reading tea leaves. Still, i think it makes sense to compare the gap surfaces in a torque manner. Standard motors mostly do not exceed an air gap force of 30kN/m² (Source energie.ch/drehmomenterzeugung). Or, to fit the "Gap A" column, this is 3N/cm²
The numbers that we get are quite realistic, sometimes even exceed the continuous rating of the motors. Not that bad, we get some idea what they should be capable of. A motor with very poor copper fill, will be way out of it's continuous rating
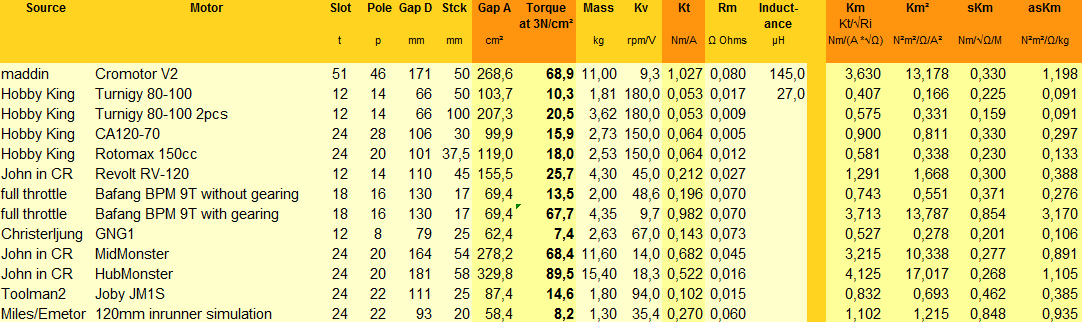
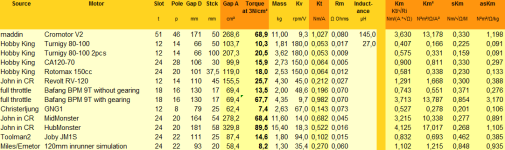
About Km²: What bothers me, is that the 2 80-100 machines are so much worse than a single RV120. At a Kv of 45, like the RV120, the 80-100 would have a Rm of 272mOhm!! The RV120 has only 27 mohm. 10 times less resistance. You see it from Km², too. The RV120 has 10 times the Km² of a 80100. Seems to be an outstanding motor.
10 times the Km² obviously tells us that the 80100 has 10 times the I²R (copper) losses for a given torque of...say 5 Nm. The RV120 is at 23.58A and 15W loss while the 80100 has 150W copper loss
The numbers that we get are quite realistic, sometimes even exceed the continuous rating of the motors. Not that bad, we get some idea what they should be capable of. A motor with very poor copper fill, will be way out of it's continuous rating
About Km²: What bothers me, is that the 2 80-100 machines are so much worse than a single RV120. At a Kv of 45, like the RV120, the 80-100 would have a Rm of 272mOhm!! The RV120 has only 27 mohm. 10 times less resistance. You see it from Km², too. The RV120 has 10 times the Km² of a 80100. Seems to be an outstanding motor.
10 times the Km² obviously tells us that the 80100 has 10 times the I²R (copper) losses for a given torque of...say 5 Nm. The RV120 is at 23.58A and 15W loss while the 80100 has 150W copper loss
Attachments
If you want to compare 2 x 80-100, just double the Km of a single 80-100 and double the weight.....crossbreak said:About Km²: What bothers me, is that the 2 80-100 machines are so much worse than a single RV120.
crossbreak
1 MW
I can not double Km. Two 80100 have half the Rm but the same Kt. So Km increases by a factor of √2. That is why i like Km²
crossbreak
1 MW
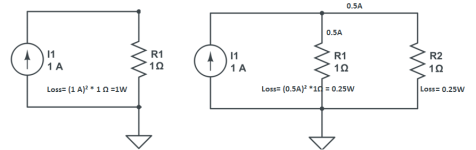
When paralleling motors, they share current and torque. As one of each only carries half of the total current and torque, it has only a quarter of the I²R loss of a single machine. Both add up to being half of that. It's like 2 resistor shearing a common current source:
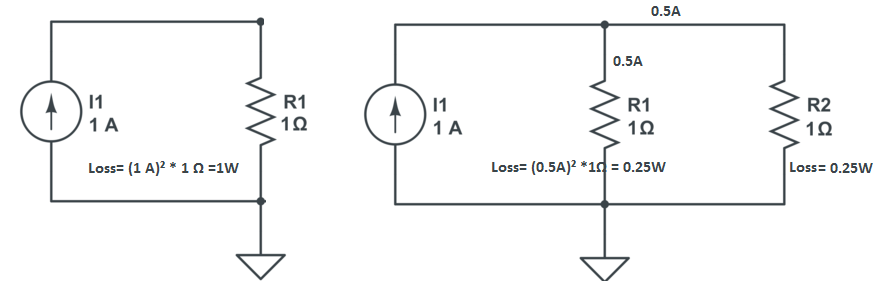
apparently, just using half of the Ri means actually: comparing two same motors with one being half of the copper fill.
If the two are connected in series, the resulting machine has half the KV, since one machine only sees half of the voltage. But the resulting machine has twice the resistance. Again, the remaining Km is only 41% bigger. that's odd
apparently, just using half of the Ri means actually: comparing two same motors with one being half of the copper fill.
If the two are connected in series, the resulting machine has half the KV, since one machine only sees half of the voltage. But the resulting machine has twice the resistance. Again, the remaining Km is only 41% bigger. that's odd
then how else? there must be a proper explanation. I am very sure that i can wire two machines in parallel, and i will measure half of the resistance of one. Kv staying the samePunx0r said:I think you cannot model two motors wired in parallel as though it was one single motor
Attachments
crossbreak
1 MW
what's wrong with excel? When writing a simulator, it should be easy to write a simple file parser as well.
Instead of excel, we could use our own XML format. but at this stage i see no reason why. It works as intended, doesn't it?
Instead of excel, we could use our own XML format. but at this stage i see no reason why. It works as intended, doesn't it?
I'd suggest keeping the Km column as it's a recognised constant. Adding the Km² column as a more intuitive torque class. Scrapping the old sKm and replacing it with the Km²/M values and calling it sKm² : ) . Using Km² instead of Km in the two power columns.
And calling it Version 2.0")
What do you think?
And calling it Version 2.0
What do you think?
Similar threads
- Replies
- 2
- Views
- 5,242
- Replies
- 11
- Views
- 3,053
- Replies
- 6
- Views
- 3,143
- Replies
- 12
- Views
- 3,398
- Replies
- 14
- Views
- 28,931