John in CR said:
Center of Gravity not Center of Mass. With tires on the ground, add weight at rear contact patch changes nothing in the movement of the frame other than dragging the added weight along with you.
John
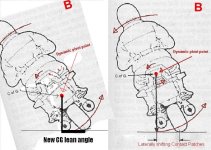
When stationary, the bike would be easy to lean to and fro and the added mass (implies weight) would not be noticable. When moving, the lower CoG would make a given turn need a larger lean. Much like how a chopper is lower than a street bike, and requires more lean to turn the same radius at the same speed. I can offer no math nor science here, only my own experience. I moved my batteries all around on my version two bike, since I didn't need to pedal there was no place I could not move them. I found out that the lower I mounted the packs the worse my handling got as speed increased, I needed more and more lean for the same turns- not safe for the tires I use. I do ride with speed, not walking pace. The best position was in the middle of the bike frame, with weight as high as my own CoG. This made the bike handle more or less the same no matter how many packs I put on. The lean angles didn't change with more weight, my effort to countersteer didn't change with more weight. It was as if the CoG stayed the same and my contact patch merely pivoted underneath to keep myself and the bike balance. At super low speeds (1 or 2mph) the increased weight was noticeable in the middle of the bike, I could feel the momentum of the packs swing around the rear contact patch. I would MUCH prefer a bike that handles well at speed instead of at walking pace. I ride, not walk my bikes.
For this reason I mounted my batteries around the top tube on v3. I constructed them to not interfere with my pedaling, and the weight centered around the top tube is as close to my belly button as possible. It also balances the bike the bike front to rear, which is top priority for having a bike handle well in sketchy conditions. Offroad, low traction, snow, and any tire slipping situation is not a problem with my current setup. The worst setup I can imagine has all of the weight on either front or rear contact patch. If one tire looses traction it is almost impossible to recover.
As an experiment, change your seat height. The lower you put your seat, the more you have to lean to execute a turn at a given speed.