I had a chance to run the simulations today
I attached the analysis in open-office format so that everyone could look and play around with it a bit.
It is a pretty basic spreadsheet, it takes the output from FEMM and does a little bit of math to figure out core loss, copper loss, input power and expected output power. There is also a second sheet in the workbook that shows the torque vs RMS phase current.
The quick analysis is that the Kv of Thuds re-wind should be about 140 in delta, and 80 in star (that is assuming 2 parallel conductors, 26 turns per phase)
The fill factor is around 44% (the slot area is 125mm^2 and the pair of #14 awg wires has a cross section area of 4.16mm^2, there are 13 pairs of #14 conductors in each slot)
The core loss at 8000-RPM shold be around 120Watts
The copper loss at 60A RMS should be around 140Watts (assuming the copper is 25 degrees C, so in reality it will be higher than that as temperature increases)
At 60A RMS, there should be about 8Nm of torque, so at 8000-RPM it should output 6700 Watts, which agrees with the input power (39V RMS * 60A RMS * 3phases - about 300Watts of loss)
The waveform looks pretty good, just a little bit sharper than sinusoid.
In the spreadsheet, the yellow boxes are the inputs, and things that can be played with. Some of them you don't want to mess with unless you really understand it. The ones that are most useful are the RPM and the Amps, and if you want, you can use the RMS amps per phase, and lookup on the torque sheet you can see how much torque the motor should produce at that current.
There are many things that are not accounted for in this spread sheet, but in my experience they are not that significant (such as skin effect as discussed in another thread). The biggest thing that is not in the spreadsheet is inductance. I haven't worked woth motors where the inductance is so low that it caused much of a problem so I haven't ever looked at inductance closely because it is very difficult to do accurately.
Enjoy .. I'll post the FEMM simulation and LUA scripts in a later post.
-ryan
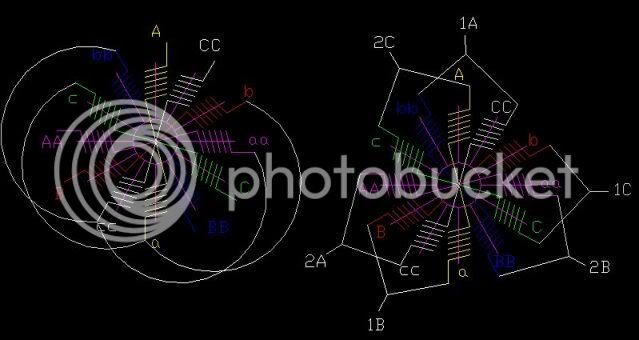
View attachment running_flux_0.jpg