2WD??.. HERE IS WHY !
Few people asked why using 2WD and saif i will have problem regarding traction, add weight, make it difficult to handle, break the fork.. etc
Now let me answer and explain why! :
The idea of a 2WD ebike came from year ago. I was really curious to see more power like that on an ebike.
As you all know, it is already easy to add insane power to a single motor so why using two??
First, the idea for the 2WD is mainly for drag racing and maybe try to beat a TESLA S. So please thing advantages i term of DRAG RACING ONLY.
I could install a hub monster or a Enertrac motorcycle hub motor to the rear as well and dump 20kW to it... but i think i would get too much weight on the swin arm and have poor weight distribution on the bike.
POWER:
I prefer keeping the 20-25 pounds motor range that can easy take 10-15kW burst without damage. If i want more power i need two, that's it.
It will be better to dump 20-30kW to two motor in term of saturation and heating than in a single one that would need very big phase wire thru the axel etc.. The hub monster is
WHY NOT USING A HUB MONSTER?:
The Hub monster is a 18kv motor.. and my past experience with 18kv motor resulted that i have blown my Adaptto controller and that required couple week of wait to get it back from warranty...

18kv require insane phase amp... and alot voltage margin for the Fets.... the 12kv is safer and i get better speed on the road with for the same phase amp. The max recorded speed with the adaptto and my 5302 ( 18kv) motor was 92km/h and i felt that there was torque missing but that the motor would have continue spining faster but it was limited by torque lack at the max phase amp the adaptto was able to pump to it. With the 5403, a 12kv motor nothing blown yet and i got 116km/h. Also, on the ebike simulator, i get better result with the 12kv motor. Also the hub monster require special axel and dropout width that i dont want to loose tiime to adatp... and then once i use another motor to have to rebuild it back to original dropout width... it is just not standard enough fo rthe mechanic.
HEAT DISSIPATED ?
I think it is better to have two larger diameter 20 pounds hub motor that offer twice more surface for heat exchange than a single small diameter but wider hub motor.
WEIGHT DISTRIBUTION:
With one of the motor on the front, that's 25 pounds more that the bike will have to lift to wheeli so it will help to keep the front wheel on the ground during the start.
TWO CONTROLLERS?
It will be easyer to manage two controllers with one on each wheel than two controller to the same motor. The Adaptto tuning would get more complicated for the tuning if both would control a single hub motor with 6 phases wires. The Adaptto HAve already a special feature to control independently two motors. Two Adaptto mean a potential of 32kW burst ( more than 30hp at the wheels!)
FRONT WHEEL TRACTION ??
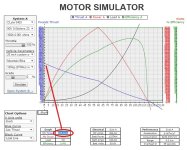
Now that's a great and interesting question! people think in term of power but i think in term of POWER AND TORQUE CONTROL.. what would make the front wheel to slip on the ground is TORQUE, not power ! NOw what does it mean?.. think about this: Power is TORQUE * SPEED, so if i have to reduce torque to keep the front wheel to have traction i only have to control the torque... and as speed increase i will eventyually reach the max power.. Max power anyway ! Just take a look to the ebike simulator image: you clearly see that the max power is not acheived at the max Torque but it is reached in an area whwere torque have reduced but that speed have increased! I am not saying that i will be able to push the full 16kW and keep torque limiting ( phase amp limiting)... but i will probably be able to push 8-10kW at least and not from a start i agree. The front motor will be more to add more powerband than to iproove the 0-60ft. I also plan to move my weight to the front wheel at the start to help, then i will take normal "aerodynamic" position.
FRONT SUSPENSION FORK AND 10+KW??
Well this is something unknown and unteted... and in fact i repeat again! this is TORQUE that really matter, not speed! well at least not in the negative torque yet!... I mean that if a bicycle fork is made to sustain hard breaking force witch can result to hundred of Nm of force to stop the bike, it can certainly take the same torque in the other directin ( positive torque direction)! Any doubt?
2WD EVERYDAY RIDE?
Not really... but i want to be able to remove the front wheel, disconnect the motor and reinstall a normal mtb wheel easy. ( in other words: going back to 1WD easy)
The drag racing setup is not for everyday ride... and if i would choose a hub monster, i would have to live with 40 pounds mass suspended on the swing arm that has been modified to fit it... but instead with 2WD, i keep the "lightweight" 20 pounds hub motor and use a normal bike wheel on the front!... just a normal ebike... with... 16kW...
Plus, this second motor wil be usable on other project =)
Doc

did you reset the controller settings after the upgrade? It is recommended