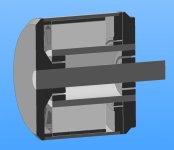
These are the dimensions we have, so far - in case anyone wants to reproduce it in their own CAD software:
Magnets: multiples of 3mm x 10mm x 20mm
Can: ex 5" x 1/8" wall tube
Shaft: 20mm dia.
Core: 112mm OD 60mm ID
Provisional slot dimensions: see pic below.
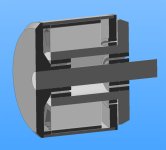
Magnets: multiples of 3mm x 10mm x 20mm
Can: ex 5" x 1/8" wall tube
Shaft: 20mm dia.
Core: 112mm OD 60mm ID
Provisional slot dimensions: see pic below.

")