
In 2014 i decided to build an Ebike with an Cube Flying Circus and and a Turnigy Rotomax 1.20 Brushless motor from Hobbyking.
I took a long time to construct the Drive with CATIA, a 3D CAD programm with tons of awesome features.
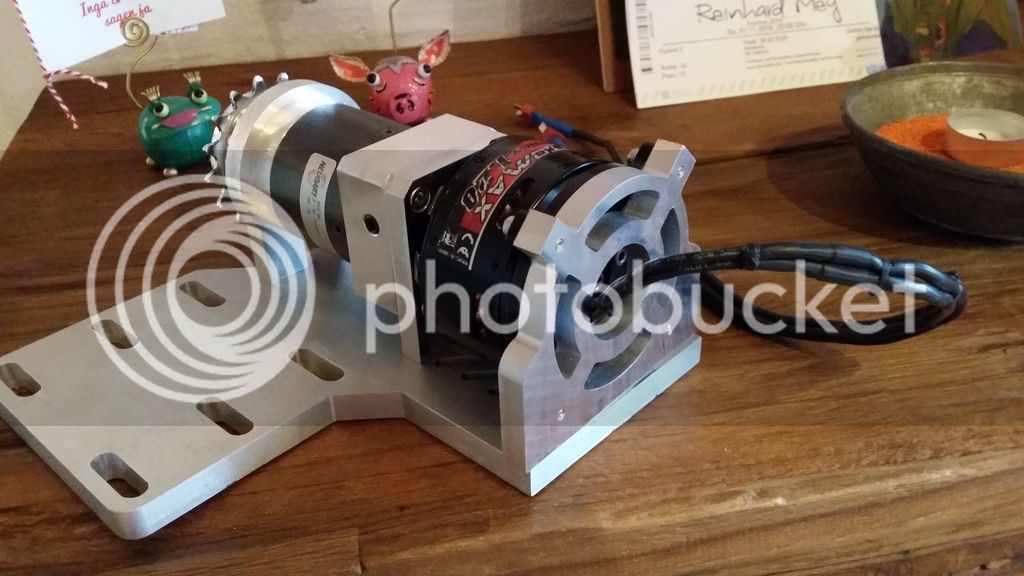
For reduction i used a Neugart PLE planetary gear.
Here are some pictues of the drive:
Some prototyping for checking dimensions etc.


Assembled drive System:



First i used a Turnigy Trackstar ESC as motor controller with an selfmade "Servotester" who converts the Throttle Signal to the Signal that the ESC needs.
For monitoring i used an Turnigy RC Power Meter.



For a nice and clean look and good connection i soldered a Sub-D connector to the ESC:

Link to the controller:
http://www.hobbyking.com/hobbyking/..._Scale_Sensorless_200amp_8s_Opto_Car_ESC.html
Then i realised that i need a device that limits the Power that goes to the Motor because the combination of the Servo Tester and the Turnigy Trackstar ESC was not good for "noob" driving and everyyday use
So i decided to take a device calls "Forumscontroller" from a german Forum called pedelecforum.de to easily control my ESC.
Also i used the Forumscontroller for Monitoring so that i could read Voltage, Power, Speed, Amperes and a lot more.
For safety reasons i also connected an kill switch to the bike

With this setup i mentioned that the motor only runs powerful at a minimum rotation speed above 2/3 of full speed!
Under this rotation speed i often got timing issues and some times the motor completly ran out of sync :x
So i thought i need a device that shows me the actual motor speed so i can easily choose the right pinion with my gear shift.
I just found an beatiful rev counter from "Koso". I made a circuit that converts the motor signals so that the rev counter can handle them.


Here you can see the working device:
https://www.dropbox.com/s/ow7hsgi0dhtc26a/Drehzahlmesser Koso.mp4?dl=0
With this setup i only got 650W of power out of the motor and that was okay for driving in the woods but just not enough power after some time of driving
So i decided to change the motor controller.
i bought an ESC for Alienpowersystems (APS) and got very good acceleration for this small Motor and a maximum power of 1000W.

With this configuration the motor was at his thermal limit and all aviable power was squeezed out of this build.
My power source for this Ebike was a combination of two Turnigy 4S2P 16AH Lipos from Hobbyking that was connected in series to a 8S Lipo.
Link to the Lipo:
http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=66309
Here are some Videos of my Bike:
First Test Ride with the first Configuration and 650W of power:
https://www.dropbox.com/s/20vy4opkawqe14w/E-bike erste Testfahrt HQ.mp4?dl=0
Finished Project, driving at a sunny day in the woods:
https://vimeo.com/129992138
If you want to see more Pictures of this build you can follow this link to get to my Dropbox where you can find all pictures made of this project:
https://www.dropbox.com/sh/3fs5zj2x51fq6cz/AACQrSffSgam-1rS0cN2l-eva?dl=0
I took a long time to construct the Drive with CATIA, a 3D CAD programm with tons of awesome features.
For reduction i used a Neugart PLE planetary gear.
Here are some pictues of the drive:
Some prototyping for checking dimensions etc.
Assembled drive System:
First i used a Turnigy Trackstar ESC as motor controller with an selfmade "Servotester" who converts the Throttle Signal to the Signal that the ESC needs.
For monitoring i used an Turnigy RC Power Meter.
For a nice and clean look and good connection i soldered a Sub-D connector to the ESC:
Link to the controller:
http://www.hobbyking.com/hobbyking/..._Scale_Sensorless_200amp_8s_Opto_Car_ESC.html
Then i realised that i need a device that limits the Power that goes to the Motor because the combination of the Servo Tester and the Turnigy Trackstar ESC was not good for "noob" driving and everyyday use
So i decided to take a device calls "Forumscontroller" from a german Forum called pedelecforum.de to easily control my ESC.
Also i used the Forumscontroller for Monitoring so that i could read Voltage, Power, Speed, Amperes and a lot more.
For safety reasons i also connected an kill switch to the bike
With this setup i mentioned that the motor only runs powerful at a minimum rotation speed above 2/3 of full speed!
Under this rotation speed i often got timing issues and some times the motor completly ran out of sync :x
So i thought i need a device that shows me the actual motor speed so i can easily choose the right pinion with my gear shift.
I just found an beatiful rev counter from "Koso". I made a circuit that converts the motor signals so that the rev counter can handle them.
Here you can see the working device:
https://www.dropbox.com/s/ow7hsgi0dhtc26a/Drehzahlmesser Koso.mp4?dl=0
With this setup i only got 650W of power out of the motor and that was okay for driving in the woods but just not enough power after some time of driving
So i decided to change the motor controller.
i bought an ESC for Alienpowersystems (APS) and got very good acceleration for this small Motor and a maximum power of 1000W.
With this configuration the motor was at his thermal limit and all aviable power was squeezed out of this build.
My power source for this Ebike was a combination of two Turnigy 4S2P 16AH Lipos from Hobbyking that was connected in series to a 8S Lipo.
Link to the Lipo:
http://www.hobbyking.com/hobbyking/store/uh_viewitem.asp?idproduct=66309
Here are some Videos of my Bike:
First Test Ride with the first Configuration and 650W of power:
https://www.dropbox.com/s/20vy4opkawqe14w/E-bike erste Testfahrt HQ.mp4?dl=0
Finished Project, driving at a sunny day in the woods:
https://vimeo.com/129992138
If you want to see more Pictures of this build you can follow this link to get to my Dropbox where you can find all pictures made of this project:
https://www.dropbox.com/sh/3fs5zj2x51fq6cz/AACQrSffSgam-1rS0cN2l-eva?dl=0