Most of it is already documented in this thread in the Technical Reference area:
http://endless-sphere.com/forums/viewtopic.php?f=16&t=7531
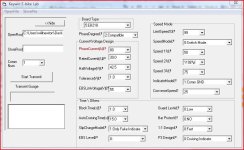
There are some new setting available in this version of the software. Here is the description of those new settings:
Guard Level: The controller has a anti-theft feature which is activated through the TB pin. This sets the polarity of that signal. The default should be 0:Low. In this mode, a low signal on the TB pin will lock the motor from turning. Presumably, this signal would come from a external alarm system. In the 1:High setting, a high signal on TB will lock the motor. In order to use the High mode, you must remove the 51K ohm resistor at location R75.
Bar Protect: This is a throttle fault protection feature. When active (1:Yes), it will shut off the motor if the throttle input is shorted to +5V. Normally WOT is around 4V, so if the wires short, or the hall sensor shorts, it should go close to 5V.
1:1 Design: This is for pedal assist sensor operation. The options are 0:Fast and 1:Slow, but another document says 0:False and 1:True.
P3 Design: This sets the function of the P3 LED output. When set to 0, the P3 output is active when in cruise control mode. When set to 1, the P3 output will also blink a trouble code when a fault is detected. The P3 output (along with the speed LED signals P1 and P2) can be active high or active low depending on the setting of "Indicate Mode". For active low, set it to 0:Comm VCC (all LEDs share a common + voltage). For active high, set it to 1:Comm GND (all LEDs share a common ground).
--Bill