@AndreyPr big thanks for your time creating a much needed App
Couple of sort of confusing issues, my display a DPC245 has only 5 levels unlike the DPC242. Your program displays 9 levels but only 5 torque assist levels. Can I pressume that 1 & 2 are a level equally 3-4 etc ?
I run a 52 volt battery, the APP shows it as 48 volts. Is there anyway of changing this to get the best battery cut offs ?
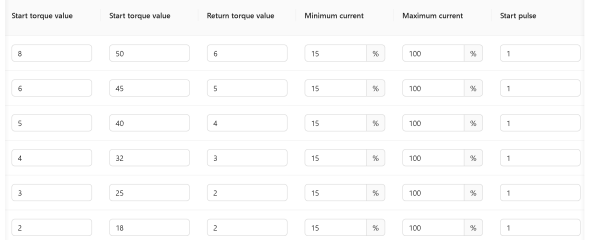
Has anyone yet found a good discription of what the torque assist sensor parameters actually do. Some are sort of self explanetry but others don't seem to make much difference. It would be nice to be able to know what effect each parameter actually controls and how it intereacts with the other parameters.
Perhaps there are some guides somewhere on the Penhoff sites but Google seems to not be finding them ?
Thanks All




")