kauaicycler
Administrator
justin_le said:jkbrigman said:And BTW: You are right, Justin has done it (VERY well!) and I have pored over every word in his thread. I'll hunt it back down and replace this sentence with a citation of his thread. I'm hoping, hoping, hoping that somewhere along the way on this thread, Justin will offer some comments!
If you wish my friend!
It looks like the discussion here has already covered most points really well so here are the tidbits I'd emphasize from my own experience
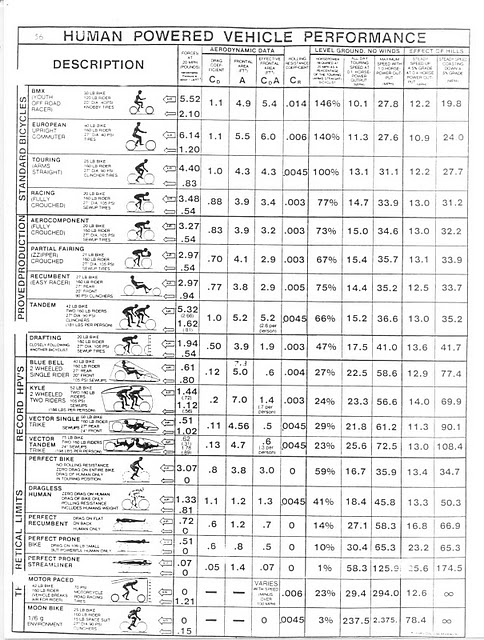
1) Recumbent: This is a total no brainer and glad to see you have already gone this way. I went in a semi-recumbent (recumbent seat sitting on the back of a stretched MTB frame) which gave the comfort advantages of a proper seat an backrest for which I was ever greatful, but it lacked the aerodynamic advantage you get from a true recumbent bike or trike. Both tadpole trikes and LWB recumbents have plenty of frame area for securing batteries and gear, but a SWB would be a nonstarter of a platform as a distance platform unless you wanted to pull a trailer. You can sit on a regular upright bike for 8, 10, 12 hours a day, tons of people do, you just wonder why when there is such a better alternative.
2) Mid-drive vs. geared hub vs direct drive hub: Here I would still be partial to a direct drive hub motor. The freewheeling nature of a geared hub doesn't give you anything, since I can guarantee you'll be using the motor 100% of the time except when you are going downhills, and then all the freewheel means is that you aren't benefiting from the regen that a DD could provide you. And the lighter weight of a geared hub is totally lost in the mix when you have 2+ kWhr of battery weight and all the gear. It would work, it's just that the usual advantages of a geared hub (better torque/weight ratio and freewheeling) aren't as valuable in this context, and the downsides (increased risk of mechanical gear or clutch failure) are all the more pressing. A mid-motor has its temptations especially in steep hilly terrain, but I really like having fully independent pedal drives and motor drives. That way if the chain snaps, the derailleur hanger breaks off, a chainring bashed etc. you can still motor along fine. On a mid-drive, a failure like this is pretty catastrophic to your progress. But you could no doubt make any of these systems work and all will have more or less equivalent efficiency at the end of the day.
3) Batteries: Definitely use the high Wh/kg energy cells, any of the samsung/panasonic/LG/Sony 2.9Ah 18650's would be fine. This way a 2kWhr battery pack is still a manageable size and weight, and 2KWhr is about the minimum you want for a 100+ mile range with some margin. You're not going to pull more than 1kw from any free/shared/public outlet, which means you won't need to support anything more than a C/2 charging rate, which means there is no need at all for high power cells like A123's or anything like that; you just wind up with a much heavier battery. I took about 1.4 Kwhr on the cross canada bike, and just under 2Kwh on the cargo bikes we rode Vancouver -> SF last year. Couldn't imagine having much less in either case.
4) Chargers: Regardless of what you do for chargers, hook things up as permanent onboard chargers already wired together and to your batteries so that you just have a single extension cord to plug the bike itself in. This way when you pull over for a lunch stop you don't have a tangle of chargers, batteries, power bars, and such to connect together. It raises eyebrows the wrong way and it makes you less inclined to take advantage of short 20-30 minute stops. You want the least amount of overhead to plug in and profit from the first exposed outlet you can find. Also, having a ~50ft extension cord gives a lot more flexibilty to find outlets in one place but position your bike somewhere else that is more convenient to lock up or keep an eye on.
5) Fairings: I have almost no experience of proper fairings, but I have heard from those that do that they can be quite noisy, amplifying every rattle and bump on the route. And overall ambient noise is something that plays into pleasure/pain factor of long distance ebike touring. But a fairing that keeps you dry when riding in the rain, that would help reduce one of the greatest miseries of all when touring on 2 wheels and would be so very well worth it.
6) Redundancy: Always have a backup motor controller and throttle with you, so that if anything goes bonkers with the electronics, or you plug in the pack with reverse polarity and fry the mosfets etc. you can always swap in the new controller and throttle and have the ability to keep powering along. It should be sensorless too so that you aren't disabled by possible hall signal issues. Similarly, the battery should be several independent packs each with their own BMS all wired up in parallel, rather than one single large battery. That way you can suffer through a battery/BMS issue and still have plenty of useable capacity from the other unaffected packs. Things are getting more and more reliable with ebike gear, but it's still not at a point where I'd bet everything on a single system.
I copied this from this post https://endless-sphere.com/forums/viewtopic.php?f=7&t=61406&start=50
In this thread two people who have done xc trips say recumbents or semi recumbents would be better choices for ebike touring. The main problem I’ve had with recumbents is my travel plans. Planes, trains, buses et all aren’t too recumbent friendly. They aren’t very ebike friendly either so I may have to deal with alternative shipping methods regardless. Given this I now need to decide on trike vs bike.
Most of the ebike touring posts I’ve seen are 5 years old or older. I believe batteries, controllers and motors have advanced a lot in the last few years so I wonder what off the shelf components I could use vs all of the custom components previous ebikers have used.
I'm thinking 2 motors, one DD 48v in front and a bbshd mid drive 48v. I like the idea of this for redundancy, regen braking and hill climbing.
Given this setup what batteries, controllers, ca analyst, chargers etc would you recommend for onboard charging with multiple batteries (in parallel) and motors? What about for redundancy?