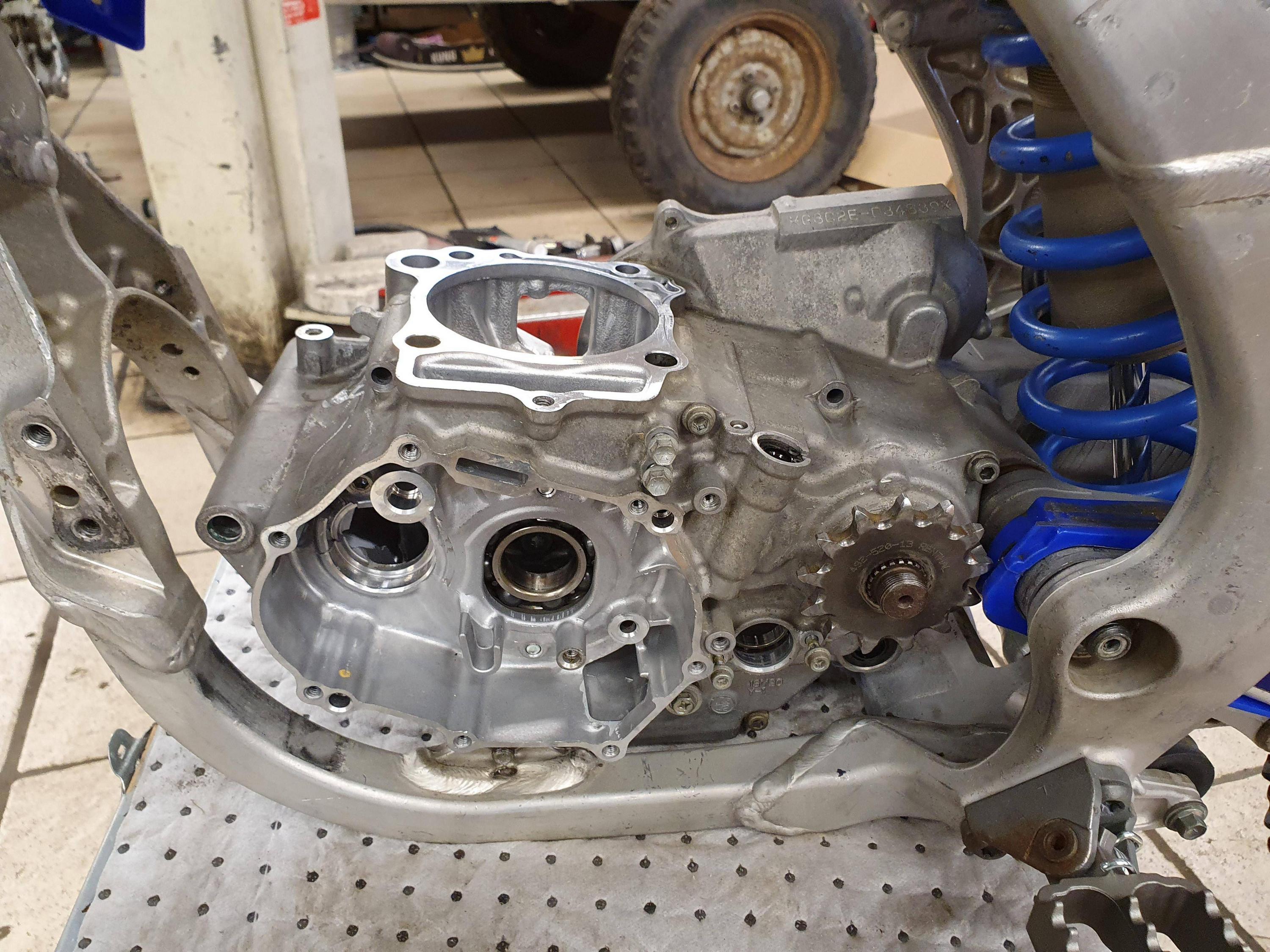
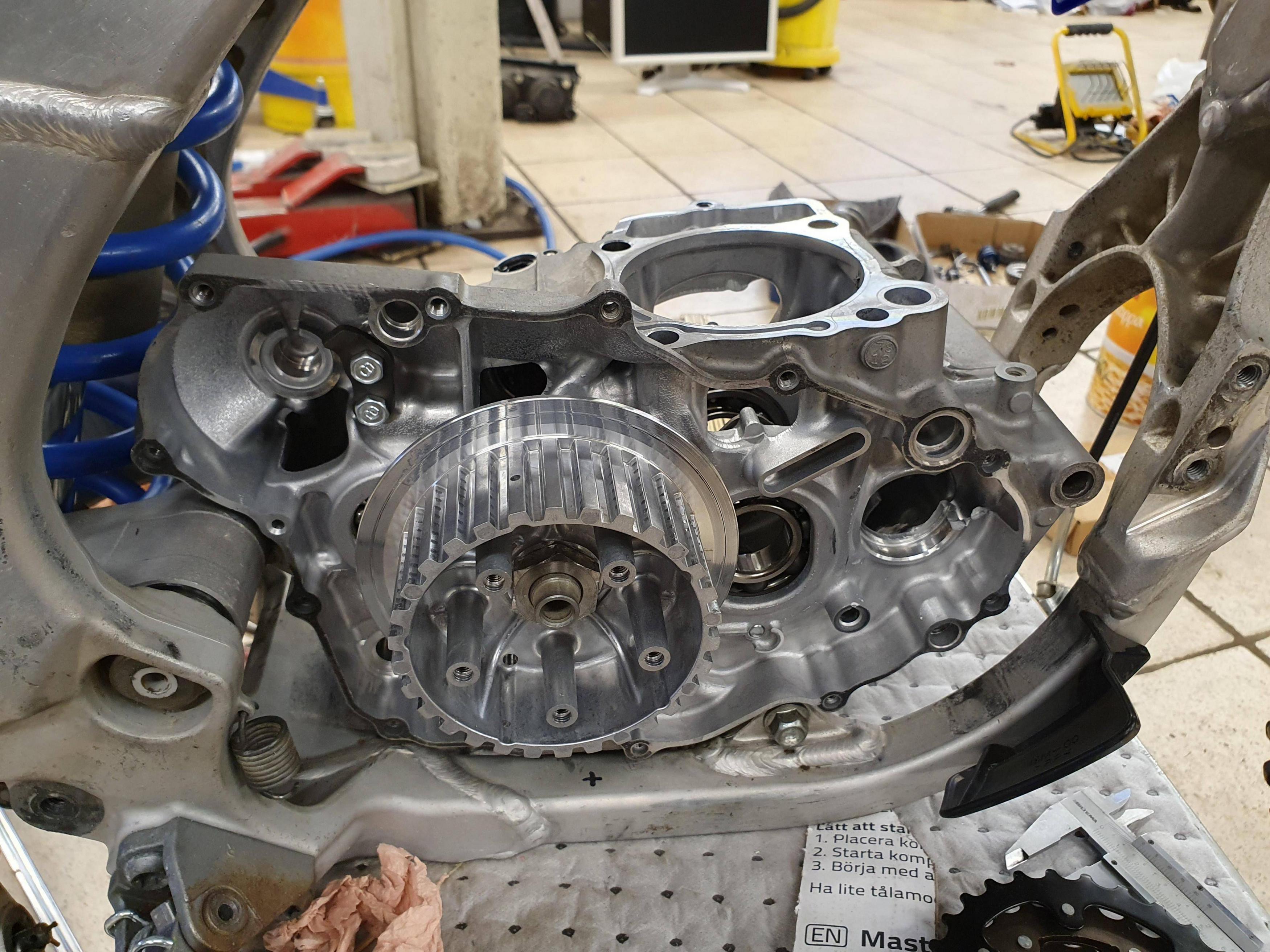
I want to do a 2 stage reduction on this bike, but I think I will have to do 3 stage instead:
With the output shaft in the standard position there is not much room for a bigger sprocket on the other side, if I just used a shaft that goes from one side to the other.
But if I use the transmission from the bike I can use a sprocket instead of the clutch.
Then it is a different story.
A problem is I dont think there is enough room for the motor in this position, I will have to move the input shaft of the transmission down. That will also mean less room for a big sprocket, but hopefully not too much.
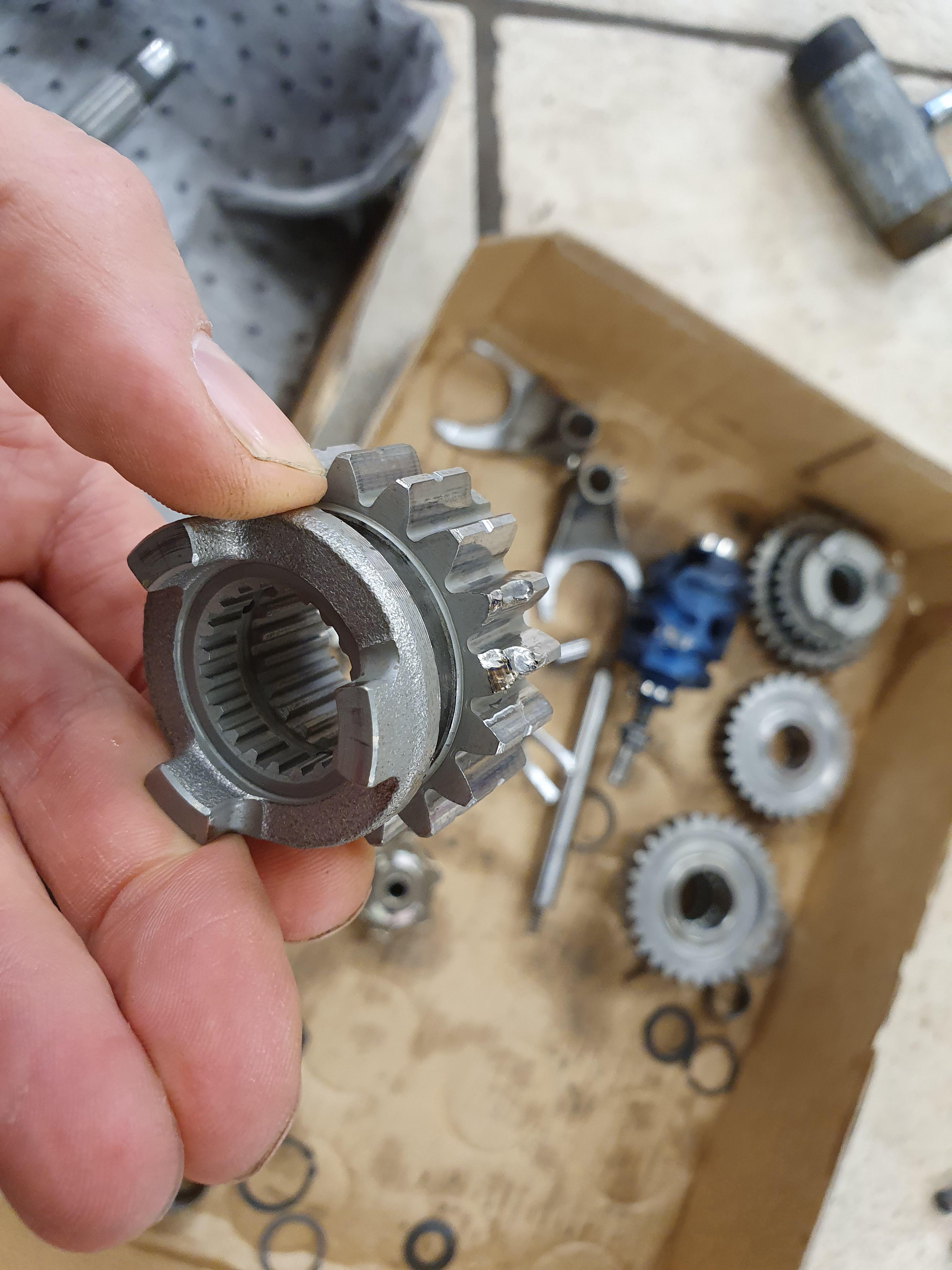
A little left over engine parts :wink:
3:d gear has taken some beating.
One of the shifters too.
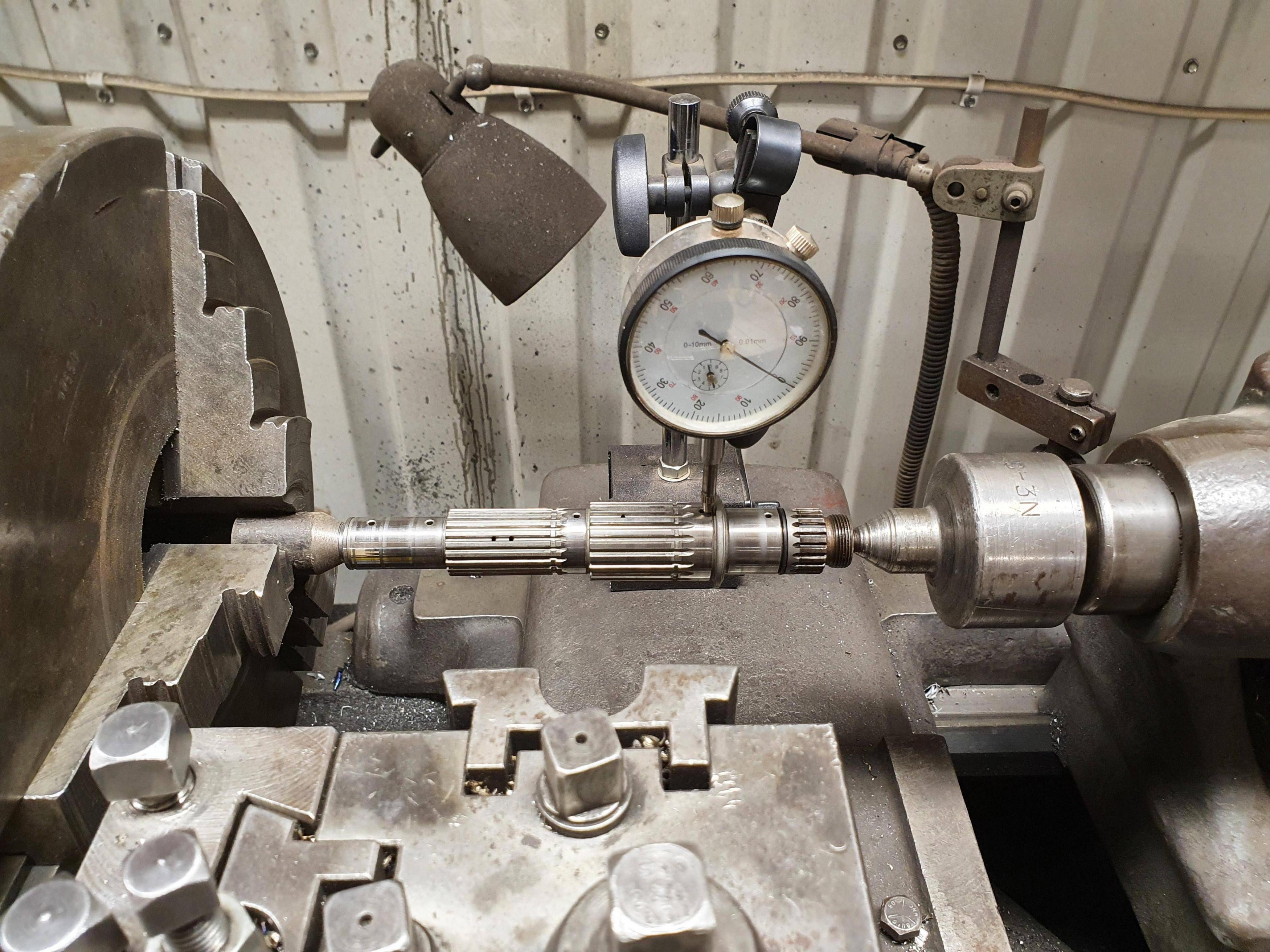
I measured runout of the shafts, it is a little high.
I get 0,2mm on the input shaft, and 0,28mm on the output shaft.
But that is from end to end, between bearings it is less.
Third and 4:t gear is damaged, but 1:st, 2

nd and 5:th seems usable.
2
nd looks strongest.
Final gear (between output shaft and wheel) is 1:3,846 (13:50)
1:st 2,14 (14:30) total 8,23
2
nd 1,75 (16:28) total 6,7305
3:d 1,444 (18:26) total 5,55
4:th 1,222 (18:22) total 4,699
5:th 1,04 (24:25) total 3,999
So I think 2
nd may be a good choice, with probably a little reduction in the first stage.