district9prawn
1 kW
Hi all,
This ebike previously had a cyclone 1680w aka cyclone mini installed on it. I was considering getting a cyclone 3000w motor as an upgrade and keeping as much the same as possible. I didn't really like this idea as the small cyclone motor with the metal planet gears was not getting great chain life. Running the motor fast and simply not pedalling helped a bit but I wanted to try a direct chain/belt drive to the rear wheel.
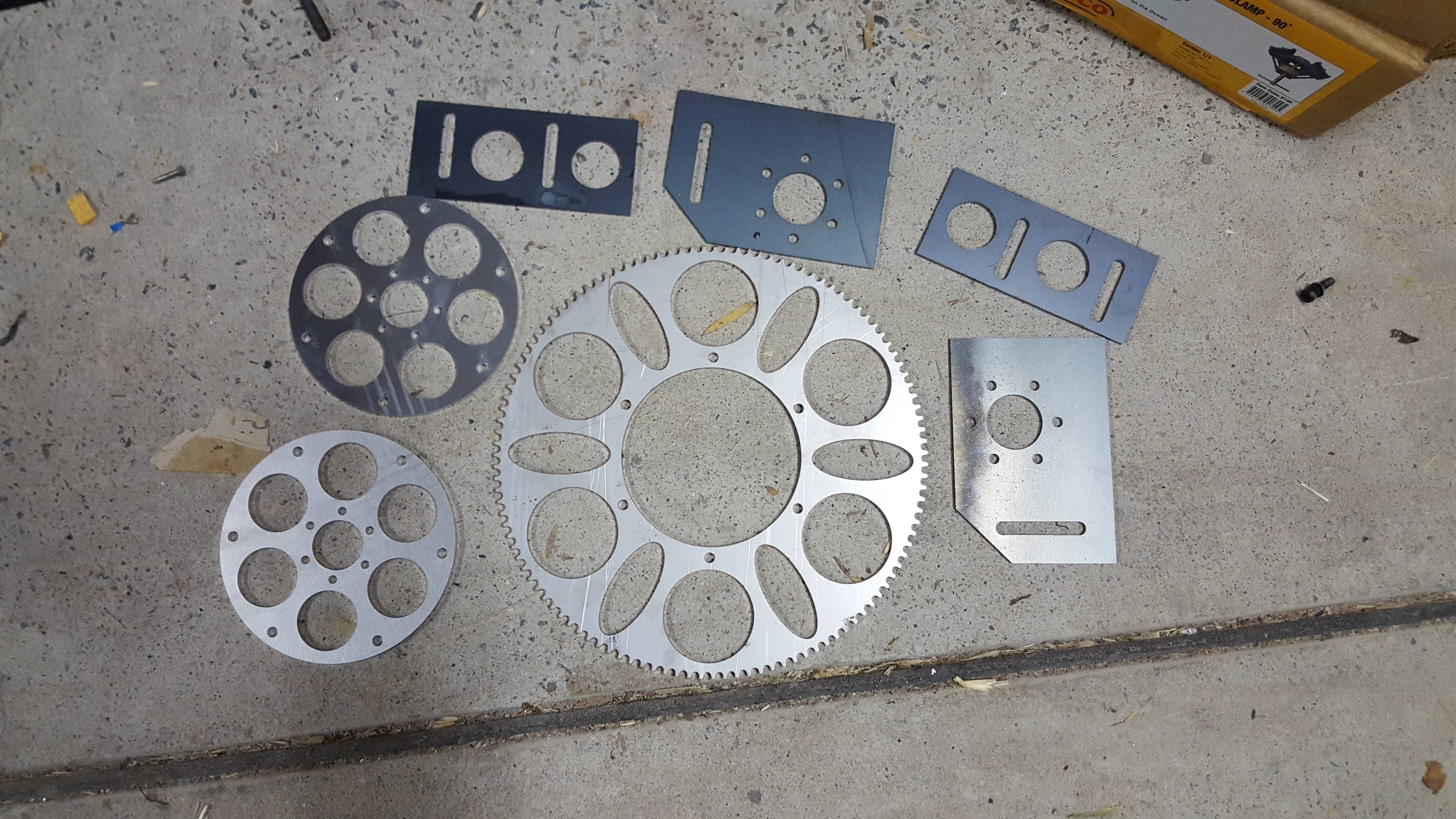
I'd always wanted to build an ebike driven by an rc outrunner but was put off by reports of poor bearing life for ev use and the complexity of the reduction. I stumbled across madin88's sweet build log https://endless-sphere.com/forums/viewtopic.php?t=91144. With a big rear sprocket, a single stage of reduction is possible, even with my 29er wheels. The 5/8" shaft diameter and large beefy bearings look like they will be reliable. With 80mm diameter stator and 57mm stator width, the neu motor is almost exactly double the motor of the cyclone 3000w, which has an 80mm rotor and approx. 28mm stator width.

Great copper fill.
A forum member was kind enough to help me out and turn a shaft that would exit the front of the motor and with a 4mm keyway. Then I could attach a 219 sprocket with the adapter made by Lightningrods.
I had similar problems to madin. My motor was not factory balanced and had a ton of vibration. I managed to balance the motor with by adding trial weights to the outside of the can. I don't know if the stock bearings were bad or if the vibration damaged them, but they quickly developed some play, even before I had actually ridden the bike. I replaced them with sealed ones.
http://i.imgur.com/puS4zyM.jpg

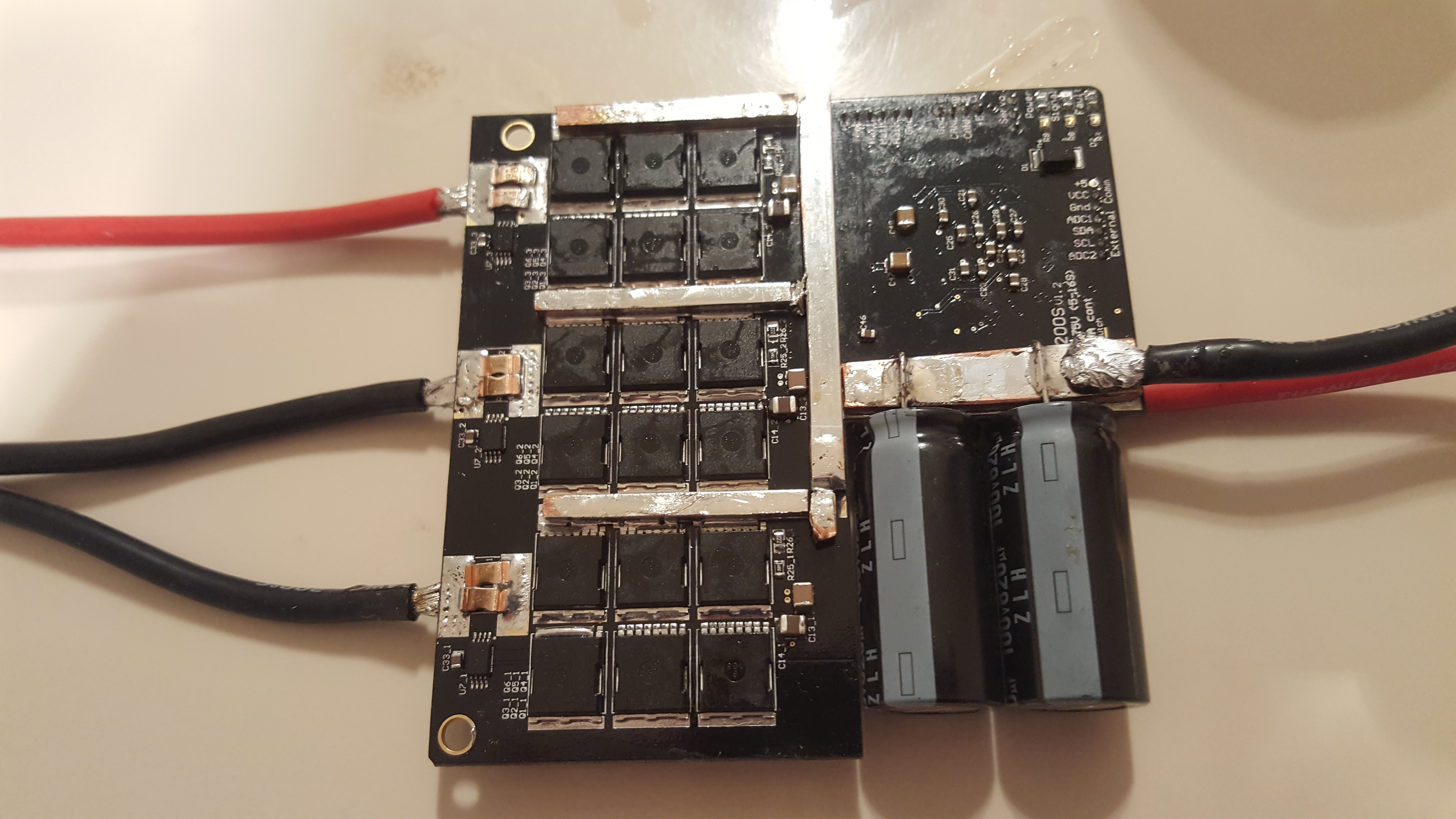
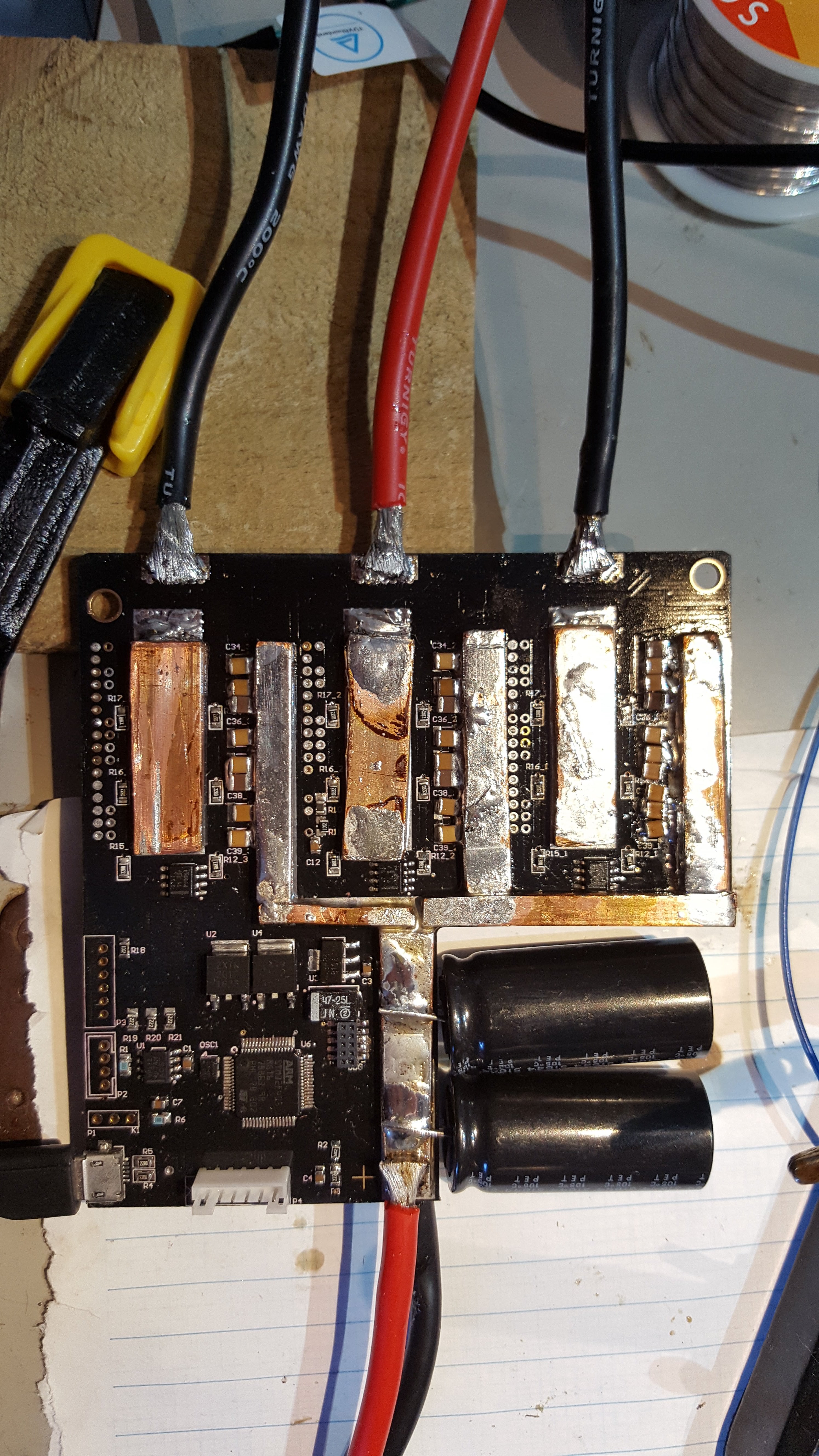
For controller I bought a pcb for an 18 fet vesc from a fellow on the Vesc Project forums. This uses 80v rated individual gate drivers rather than the rather fragile 60v rated motor driver IC.
The soldered board with copper bus bars.
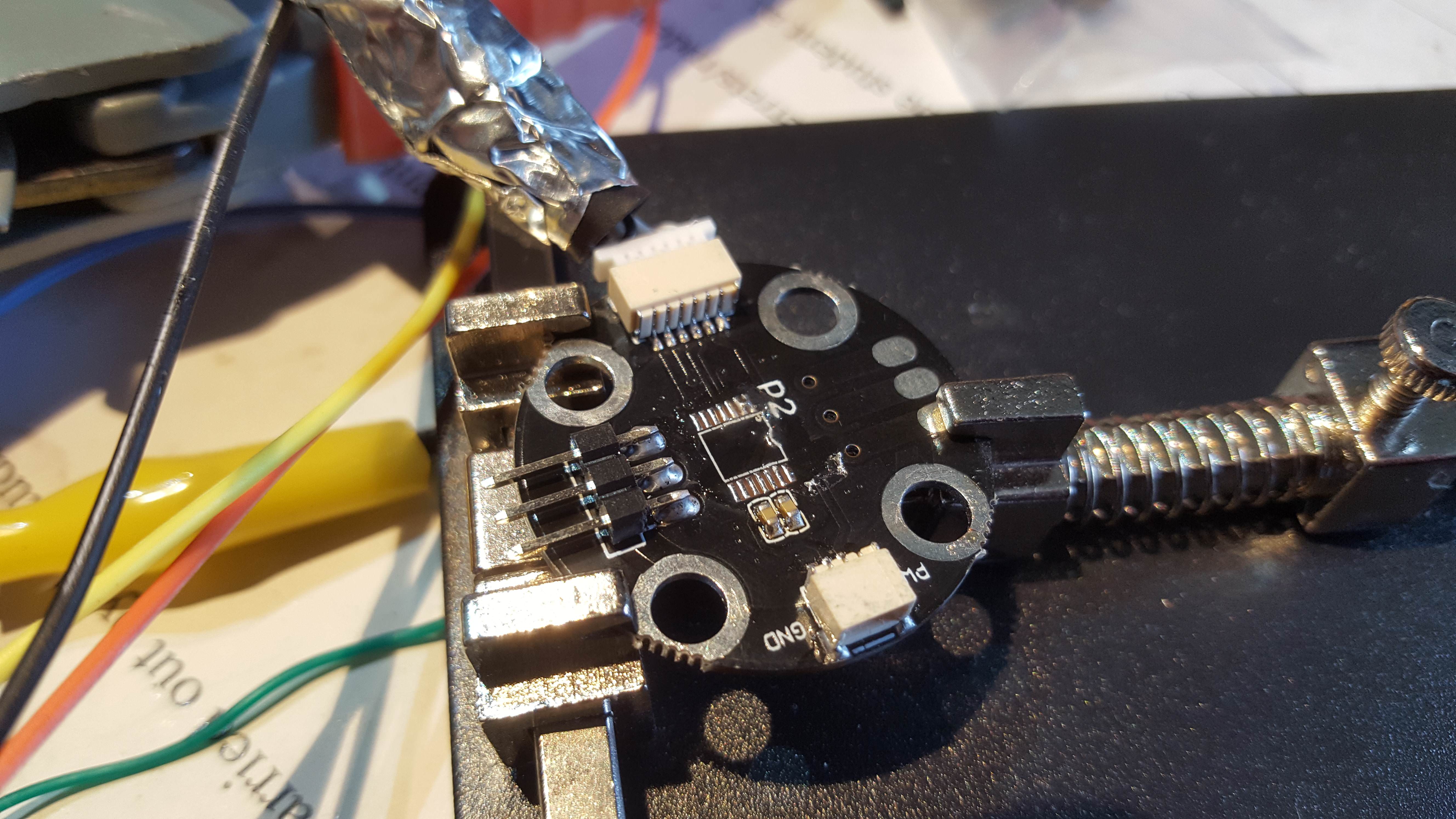
I'm using the AS5147 rotary encoder as this is supported by the vesc. I 3d printed a cover to go over the shaft to mount the encoder pcb. Then I super glued the magnet on to the end of the shaft. I found the sensorless start in foc was not good. I;m pretty sure this is because the values of the current shunts are really low and the resistance of the motor is also very low so the controller has to cope with a lot of noise during start. The encoder has 14 bit precision on the angle value (more like 11-12 bit with noise and possibly misaligned magnet) and the motor starts really nicely. It is also possible to do silly stuff like smoothly crawling up hills with the rear wheel barely turning.
<Encoder pics and stuff here>
Here is the finished bike. Battery is 14s8p of saggy old Samsung 25R. No rear brake, I'm just using a left thumb throttle for regen and keeping it simple. I will be on the street 90% of the time and it doesn't rain that much in Sydney. I'm not a fan of the ebrake activated variable regen controlled by the main throttle. For the uncoordinated like myself I feel like it is a recipe for accidental WOT. At the moment the bike is way over geared. A 12t motor sprocket and 91t rear sprocket gives 80kph at 4000 motor rpm. This seems absurd but with the motor's high copper fill, I calculated that resistive losses are slightly lower than my cyclone in 5th gear on the 10sp cassette. 5th gear was the gear I would use for climbing steep hills.

I had chain drops on my first few rides. The usual alignment and tension problems. After sorting those out I was able to crank the phase amps up to 350. Crazy stuff. Despite being geared so high and with the 4s battery pack in the front box I can still wheelie.
I have a 115t laser cut sprocket on the way. This should give about 60kph top speed. I've added field weakening to the vesc foc code so I can keep my top speed while being more efficient for hill climbing. I made it trigger when there is a mismatch between commanded phase current and actual phase current. This means it can kick in below top speed to try and bring motor current closer to the requested current from throttle.
This ebike previously had a cyclone 1680w aka cyclone mini installed on it. I was considering getting a cyclone 3000w motor as an upgrade and keeping as much the same as possible. I didn't really like this idea as the small cyclone motor with the metal planet gears was not getting great chain life. Running the motor fast and simply not pedalling helped a bit but I wanted to try a direct chain/belt drive to the rear wheel.
I'd always wanted to build an ebike driven by an rc outrunner but was put off by reports of poor bearing life for ev use and the complexity of the reduction. I stumbled across madin88's sweet build log https://endless-sphere.com/forums/viewtopic.php?t=91144. With a big rear sprocket, a single stage of reduction is possible, even with my 29er wheels. The 5/8" shaft diameter and large beefy bearings look like they will be reliable. With 80mm diameter stator and 57mm stator width, the neu motor is almost exactly double the motor of the cyclone 3000w, which has an 80mm rotor and approx. 28mm stator width.
Great copper fill.
A forum member was kind enough to help me out and turn a shaft that would exit the front of the motor and with a 4mm keyway. Then I could attach a 219 sprocket with the adapter made by Lightningrods.
I had similar problems to madin. My motor was not factory balanced and had a ton of vibration. I managed to balance the motor with by adding trial weights to the outside of the can. I don't know if the stock bearings were bad or if the vibration damaged them, but they quickly developed some play, even before I had actually ridden the bike. I replaced them with sealed ones.
http://i.imgur.com/puS4zyM.jpg
For controller I bought a pcb for an 18 fet vesc from a fellow on the Vesc Project forums. This uses 80v rated individual gate drivers rather than the rather fragile 60v rated motor driver IC.
The soldered board with copper bus bars.
I'm using the AS5147 rotary encoder as this is supported by the vesc. I 3d printed a cover to go over the shaft to mount the encoder pcb. Then I super glued the magnet on to the end of the shaft. I found the sensorless start in foc was not good. I;m pretty sure this is because the values of the current shunts are really low and the resistance of the motor is also very low so the controller has to cope with a lot of noise during start. The encoder has 14 bit precision on the angle value (more like 11-12 bit with noise and possibly misaligned magnet) and the motor starts really nicely. It is also possible to do silly stuff like smoothly crawling up hills with the rear wheel barely turning.
<Encoder pics and stuff here>
Here is the finished bike. Battery is 14s8p of saggy old Samsung 25R. No rear brake, I'm just using a left thumb throttle for regen and keeping it simple. I will be on the street 90% of the time and it doesn't rain that much in Sydney. I'm not a fan of the ebrake activated variable regen controlled by the main throttle. For the uncoordinated like myself I feel like it is a recipe for accidental WOT. At the moment the bike is way over geared. A 12t motor sprocket and 91t rear sprocket gives 80kph at 4000 motor rpm. This seems absurd but with the motor's high copper fill, I calculated that resistive losses are slightly lower than my cyclone in 5th gear on the 10sp cassette. 5th gear was the gear I would use for climbing steep hills.
I had chain drops on my first few rides. The usual alignment and tension problems. After sorting those out I was able to crank the phase amps up to 350. Crazy stuff. Despite being geared so high and with the 4s battery pack in the front box I can still wheelie.
I have a 115t laser cut sprocket on the way. This should give about 60kph top speed. I've added field weakening to the vesc foc code so I can keep my top speed while being more efficient for hill climbing. I made it trigger when there is a mismatch between commanded phase current and actual phase current. This means it can kick in below top speed to try and bring motor current closer to the requested current from throttle.

")